Re: /rtabmap/grid_map not aligned with 2d scan
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-grid-map-not-aligned-with-2d-scan-tp6595p6650.html
Hi,
I replayed the bag (with map frame filtered using this script to avoid tf conflict with re-running rtabmap on that bag, note also that I launched in different namespace rtabmap2 to avoid conflicts with rtabmap topics recorded in the bag) like this:
$ roslaunch rtabmap_ros rtabmap.launch args:="-d --Reg/Strategy 1" \
namespace:="rtabmap2" \
visual_odometry:=false \
odom_frame_id:=t265_odom_frame \
frame_id:=t265_rectified_pose_frame \
rgbd_sync:=true \
depth_topic:=/camera/aligned_depth_to_color/image_raw \
rgb_topic:=/camera/color/image_raw \
camera_info_topic:=/camera/color/camera_info \
subscribe_scan:=true \
scan_topic:=/ydlidar/scan \
use_sim_time:=true \
approx_rgbd_sync:=false \
queue_size:=100
$ python filterBagTF.py #Change input.bag to rtabmap_tilt.bag and output.bag to rtabmap_tilt_out.bag
$ rosbag play --clock --pause rtabmap_tilt_out.bag
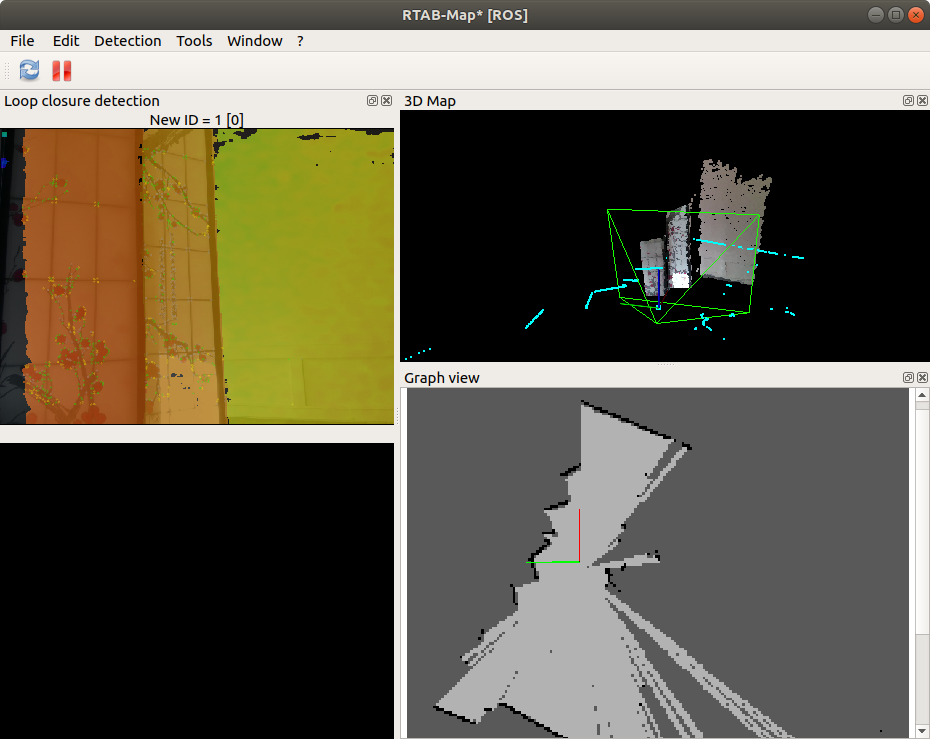
So I cannot reproduce the strange occupancy grid of the bag.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-grid-map-not-aligned-with-2d-scan-tp6595p6650.html
Hi,
I replayed the bag (with map frame filtered using this script to avoid tf conflict with re-running rtabmap on that bag, note also that I launched in different namespace rtabmap2 to avoid conflicts with rtabmap topics recorded in the bag) like this:
$ roslaunch rtabmap_ros rtabmap.launch args:="-d --Reg/Strategy 1" \
namespace:="rtabmap2" \
visual_odometry:=false \
odom_frame_id:=t265_odom_frame \
frame_id:=t265_rectified_pose_frame \
rgbd_sync:=true \
depth_topic:=/camera/aligned_depth_to_color/image_raw \
rgb_topic:=/camera/color/image_raw \
camera_info_topic:=/camera/color/camera_info \
subscribe_scan:=true \
scan_topic:=/ydlidar/scan \
use_sim_time:=true \
approx_rgbd_sync:=false \
queue_size:=100
$ python filterBagTF.py #Change input.bag to rtabmap_tilt.bag and output.bag to rtabmap_tilt_out.bag
$ rosbag play --clock --pause rtabmap_tilt_out.bag
So I cannot reproduce the strange occupancy grid of the bag.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |