RTABMAP in Desktop Station doesn't display point clouds
Posted by PAlfaro on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-in-Desktop-Station-doesn-t-display-point-clouds-tp676.html
Hello everyone!
I'm using two computers for my project. The master is a laptop connected to my roomba, also, in this computer I have connected a Hokuyo sensor laser and Xtion PRO. I use the command $ export ROS_IP=XXX.XXX.XXX.XXX and $ export ROS_MASTER_URI=http://XXX.XXX.XXX.XXX:11311 for communication.
After I introduce the export commands in both computers I type in my Master the next lines:
$ roslaunch openni2_launch openni2.launch depth_registration:=true
And then in my station computer:
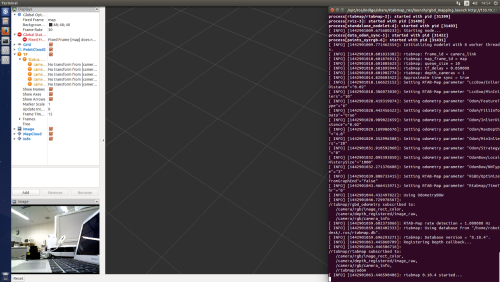
$ roslaunch rtabmap_ros rgbd_mapping.launch rviz:=true rtabmapviz:=false
But I only got the screen for Rviz with the camera image in real time, but no point clouds, also it has an error that says that Fixed Frame [map] does not exist, and the TF shows warnings about map and the camera_depth_frame, camera_depth_optical_frame, camera_link, camera_rgb_frame and camera_rgb_optical_frame.
If I run all the commands in the same computer it works without any problem.
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-in-Desktop-Station-doesn-t-display-point-clouds-tp676.html
Hello everyone!
I'm using two computers for my project. The master is a laptop connected to my roomba, also, in this computer I have connected a Hokuyo sensor laser and Xtion PRO. I use the command $ export ROS_IP=XXX.XXX.XXX.XXX and $ export ROS_MASTER_URI=http://XXX.XXX.XXX.XXX:11311 for communication.
After I introduce the export commands in both computers I type in my Master the next lines:
$ roslaunch openni2_launch openni2.launch depth_registration:=true
And then in my station computer:
$ roslaunch rtabmap_ros rgbd_mapping.launch rviz:=true rtabmapviz:=false
But I only got the screen for Rviz with the camera image in real time, but no point clouds, also it has an error that says that Fixed Frame [map] does not exist, and the TF shows warnings about map and the camera_depth_frame, camera_depth_optical_frame, camera_link, camera_rgb_frame and camera_rgb_optical_frame.
If I run all the commands in the same computer it works without any problem.
| Free forum by Nabble | Edit this page |