Monocular mapping on RPi with low depth quality
Posted by utrecht on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Monocular-mapping-on-RPi-with-low-depth-quality-tp6832.html
Hey Mathieu,
I'm trying to run RTABMap using monocular depth generated from a Raspberry Pi camera. I have no issue running the node, it's just that I'm having trouble generating a good quality 3D map. I'm tried with two different neural networks (fast-depth and mobilepydnet) to compute an approximate 3D image, but in both cases I'm getting very low quality maps:
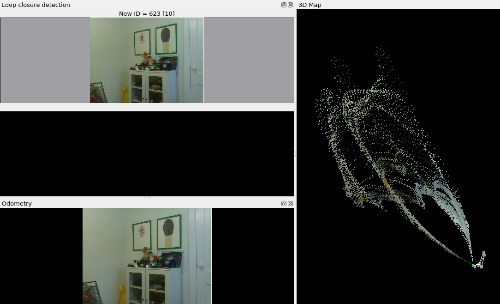
I used ORB-SLAM to generate odometry, and I think my calibration parameters are good. Since you have better knowledge, I figured you might be able to help with the mapping strategy settings. I hope to share the scripts and models with you for possible integration into RTABMap for running on a Raspberry Pi or otherwise any system with one camera. Here is my launch file:
<launch>
<param name="use_sim_time" type="bool" value="True"/>
<!-- Choose visualization -->
<arg name="rviz" default="false" />
<arg name="rtabmapviz" default="true" />
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<!-- Corresponding config files -->
<arg name="rtabmapviz_cfg" default="~/.ros/rtabmap_gui.ini" />
<arg name="rviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd.rviz" />
<arg name="frame_id" default="rpi_cam"/> <!-- Fixed frame id, you may set "base_link" or "base_footprint" if they are published -->
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<arg name="rtabmap_args" default=""/> <!-- delete_db_on_start, udebug -->
<arg name="launch_prefix" default=""/> <!-- for debugging purpose, it fills launch-prefix tag of the nodes -->
<arg name="approx_sync" default="true"/> <!-- if timestamps of the input topics are not synchronized -->
<arg name="rgb_topic" default="/usb_cam/image_raw" />
<arg name="depth_registered_topic" default="/usb_cam/depth" />
<arg name="camera_info_topic" default="/usb_cam/camera_info" />
<arg name="compressed" default="false"/>
<arg name="subscribe_scan" default="false"/> <!-- Assuming 2D scan if set, rtabmap will do 3DoF mapping instead of 6DoF -->
<arg name="scan_topic" default="/scan"/>
<arg name="subscribe_scan_cloud" default="false"/> <!-- Assuming 3D scan if set -->
<arg name="scan_cloud_topic" default="/scan_cloud"/>
<arg name="visual_odometry" default="false"/> <!-- Generate visual odometry -->
<arg name="odom_topic" default="/odom"/> <!-- Odometry topic used if visual_odometry is false -->
<arg name="odom_frame_id" default="rpi_cam"/> <!-- If set, TF is used to get odometry instead of the topic -->
<arg name="namespace" default="rtabmap"/>
<arg name="wait_for_transform" default="10"/>
<arg name="queue_size" default="40"/>
<arg name="map_frame_id" default="map"/>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmapviz" value="$(arg rtabmapviz)" />
<arg name="rviz" value="$(arg rviz)" />
<arg name="localization" value="$(arg localization)"/>
<arg name="gui_cfg" value="$(arg rtabmapviz_cfg)" />
<arg name="rviz_cfg" value="$(arg rviz_cfg)" />
<arg name="frame_id" value="$(arg frame_id)"/>
<arg name="queue_size" value="$(arg queue_size)"/>
<arg name="namespace" value="$(arg namespace)"/>
<arg name="database_path" value="$(arg database_path)"/>
<arg name="wait_for_transform" value="$(arg wait_for_transform)"/>
<arg name="rtabmap_args" value="$(arg rtabmap_args)"/>
<arg name="launch_prefix" value="$(arg launch_prefix)"/>
<arg name="approx_sync" value="$(arg approx_sync)"/>
<arg name="rgb_topic" value="$(arg rgb_topic)" />
<arg name="depth_topic" value="$(arg depth_registered_topic)" />
<arg name="camera_info_topic" value="$(arg camera_info_topic)" />
<arg name="compressed" value="$(arg compressed)"/>
<arg name="subscribe_scan" value="$(arg subscribe_scan)"/>
<arg name="scan_topic" value="$(arg scan_topic)"/>
<arg name="subscribe_scan_cloud" value="$(arg subscribe_scan_cloud)"/>
<arg name="scan_cloud_topic" value="$(arg scan_cloud_topic)"/>
<arg name="visual_odometry" value="$(arg visual_odometry)"/>
<arg name="odom_topic" value="$(arg odom_topic)"/>
<arg name="odom_frame_id" value="$(arg odom_frame_id)"/>
<arg name="odom_args" value="$(arg rtabmap_args)"/>
</include>
</launch>
</pre></div>
I also attached a very small db rtabmap.db so you could test it for yourself. If the depth quality is way too bad to be used, I would appreciate any insights you may have.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Monocular-mapping-on-RPi-with-low-depth-quality-tp6832.html
Hey Mathieu,
I'm trying to run RTABMap using monocular depth generated from a Raspberry Pi camera. I have no issue running the node, it's just that I'm having trouble generating a good quality 3D map. I'm tried with two different neural networks (fast-depth and mobilepydnet) to compute an approximate 3D image, but in both cases I'm getting very low quality maps:
I used ORB-SLAM to generate odometry, and I think my calibration parameters are good. Since you have better knowledge, I figured you might be able to help with the mapping strategy settings. I hope to share the scripts and models with you for possible integration into RTABMap for running on a Raspberry Pi or otherwise any system with one camera. Here is my launch file:
<launch>
<param name="use_sim_time" type="bool" value="True"/>
<!-- Choose visualization -->
<arg name="rviz" default="false" />
<arg name="rtabmapviz" default="true" />
<!-- Localization-only mode -->
<arg name="localization" default="false"/>
<!-- Corresponding config files -->
<arg name="rtabmapviz_cfg" default="~/.ros/rtabmap_gui.ini" />
<arg name="rviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd.rviz" />
<arg name="frame_id" default="rpi_cam"/> <!-- Fixed frame id, you may set "base_link" or "base_footprint" if they are published -->
<arg name="database_path" default="~/.ros/rtabmap.db"/>
<arg name="rtabmap_args" default=""/> <!-- delete_db_on_start, udebug -->
<arg name="launch_prefix" default=""/> <!-- for debugging purpose, it fills launch-prefix tag of the nodes -->
<arg name="approx_sync" default="true"/> <!-- if timestamps of the input topics are not synchronized -->
<arg name="rgb_topic" default="/usb_cam/image_raw" />
<arg name="depth_registered_topic" default="/usb_cam/depth" />
<arg name="camera_info_topic" default="/usb_cam/camera_info" />
<arg name="compressed" default="false"/>
<arg name="subscribe_scan" default="false"/> <!-- Assuming 2D scan if set, rtabmap will do 3DoF mapping instead of 6DoF -->
<arg name="scan_topic" default="/scan"/>
<arg name="subscribe_scan_cloud" default="false"/> <!-- Assuming 3D scan if set -->
<arg name="scan_cloud_topic" default="/scan_cloud"/>
<arg name="visual_odometry" default="false"/> <!-- Generate visual odometry -->
<arg name="odom_topic" default="/odom"/> <!-- Odometry topic used if visual_odometry is false -->
<arg name="odom_frame_id" default="rpi_cam"/> <!-- If set, TF is used to get odometry instead of the topic -->
<arg name="namespace" default="rtabmap"/>
<arg name="wait_for_transform" default="10"/>
<arg name="queue_size" default="40"/>
<arg name="map_frame_id" default="map"/>
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmapviz" value="$(arg rtabmapviz)" />
<arg name="rviz" value="$(arg rviz)" />
<arg name="localization" value="$(arg localization)"/>
<arg name="gui_cfg" value="$(arg rtabmapviz_cfg)" />
<arg name="rviz_cfg" value="$(arg rviz_cfg)" />
<arg name="frame_id" value="$(arg frame_id)"/>
<arg name="queue_size" value="$(arg queue_size)"/>
<arg name="namespace" value="$(arg namespace)"/>
<arg name="database_path" value="$(arg database_path)"/>
<arg name="wait_for_transform" value="$(arg wait_for_transform)"/>
<arg name="rtabmap_args" value="$(arg rtabmap_args)"/>
<arg name="launch_prefix" value="$(arg launch_prefix)"/>
<arg name="approx_sync" value="$(arg approx_sync)"/>
<arg name="rgb_topic" value="$(arg rgb_topic)" />
<arg name="depth_topic" value="$(arg depth_registered_topic)" />
<arg name="camera_info_topic" value="$(arg camera_info_topic)" />
<arg name="compressed" value="$(arg compressed)"/>
<arg name="subscribe_scan" value="$(arg subscribe_scan)"/>
<arg name="scan_topic" value="$(arg scan_topic)"/>
<arg name="subscribe_scan_cloud" value="$(arg subscribe_scan_cloud)"/>
<arg name="scan_cloud_topic" value="$(arg scan_cloud_topic)"/>
<arg name="visual_odometry" value="$(arg visual_odometry)"/>
<arg name="odom_topic" value="$(arg odom_topic)"/>
<arg name="odom_frame_id" value="$(arg odom_frame_id)"/>
<arg name="odom_args" value="$(arg rtabmap_args)"/>
</include>
</launch>
</pre></div>
I also attached a very small db rtabmap.db so you could test it for yourself. If the depth quality is way too bad to be used, I would appreciate any insights you may have.
| Free forum by Nabble | Edit this page |