rtabmap with octomap and hector slam
Posted by boon on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696.html
I am trying to create a mapping as seen in this video, Autonomous Flight of a simulated Quadrotor using moveit . I am just simulation and don't have any hardware setup. I ran hector indoor SLAM demo with kinect and then used rtabmap and then octomap. But I could not see any 3D maps being generated.
This is what I did,
$ roslaunch hector_quadrotor_demo indoor_slam_gazebo.launch
$ roslaunch rtabmap_ros rgbd_mapping.launch rtabmapviz:=false rviz:=true
$ rosrun octomap_server octomap_server_node cloud_in:=/rtabmap/cloud_map
What should I be doing to reproduce the mapping that was done in the video?
my rqtgraph,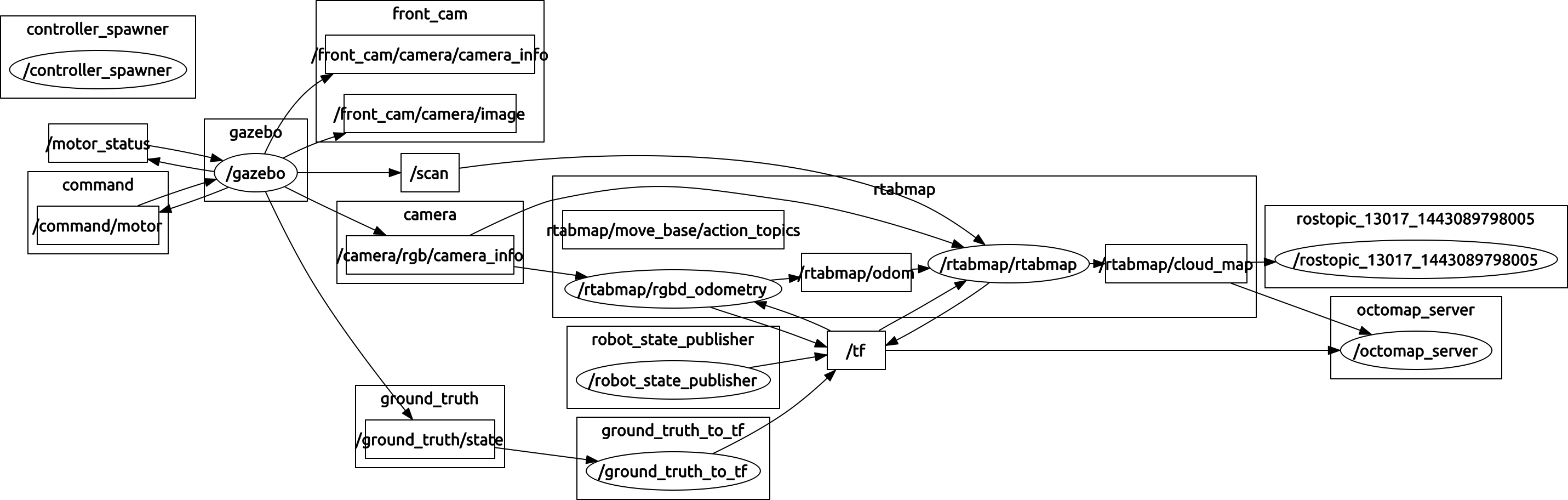
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696.html
I am trying to create a mapping as seen in this video, Autonomous Flight of a simulated Quadrotor using moveit . I am just simulation and don't have any hardware setup. I ran hector indoor SLAM demo with kinect and then used rtabmap and then octomap. But I could not see any 3D maps being generated.
This is what I did,
$ roslaunch hector_quadrotor_demo indoor_slam_gazebo.launch
$ roslaunch rtabmap_ros rgbd_mapping.launch rtabmapviz:=false rviz:=true
$ rosrun octomap_server octomap_server_node cloud_in:=/rtabmap/cloud_map
What should I be doing to reproduce the mapping that was done in the video?
my rqtgraph,
| Free forum by Nabble | Edit this page |