ZED2 rtabmap loop closure and twisted map
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/ZED2-rtabmap-loop-closure-and-twisted-map-tp6986.html
Dear people.
I took the ZED2 just to play a bit with it 🙂
Just to summarized, the following was installed:
ZED SDK V 3.2.2 for Ubunto 18.04
RtabMap V 0.20.4 (from source)
rtabmap_ros (from source)
Cuada V 11.0
Octomap
zed_wrapper
Among others
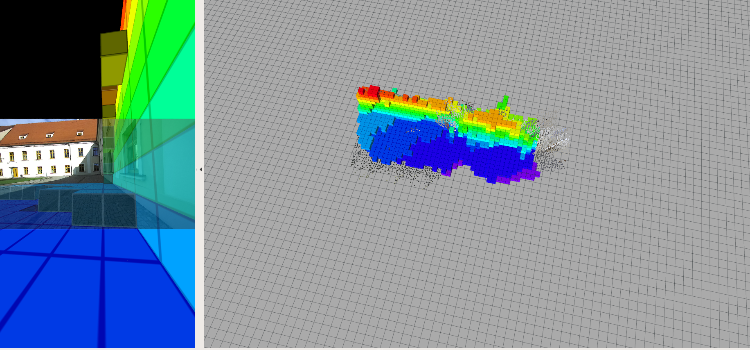
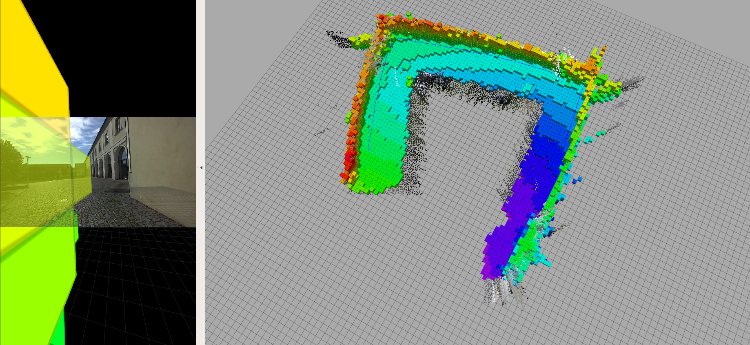
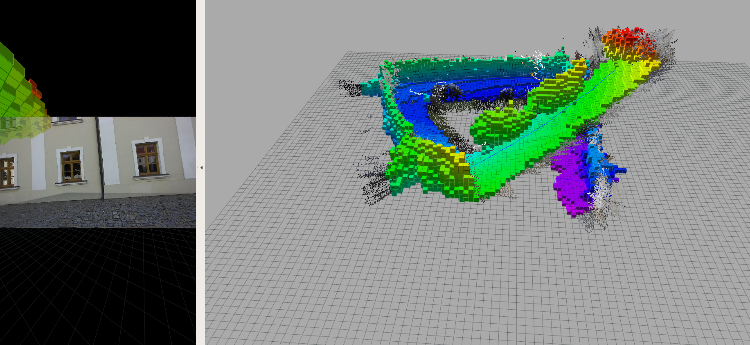
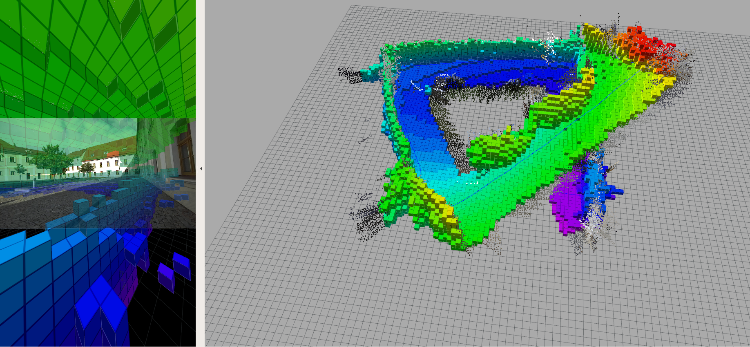
1.- The map is shifted a lot before loop closure.
2.- When there is a loop closure the map reminds twisted and not aligned with the floor.
3.- The octomap map on the image is shifted
4.- When the camera is in the same point of view and in already visited place, it does not make a loop closure, the camera needs to move forward and backwards on the same direction till finally it gets a loop closure. In other words, it takes time for the loop closure to happen.
The script I am using is shown as follows.
<arg name="ground_is_obstacle" default="false"/>
<arg name="align_with_ground" default="false"/>
<group ns="/zed/">
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start --Optimizer/GravitySigma 0.3 --Grid/3D true --Grid/RangeMax 7 --Grid/CellSize 0.3 --Grid/GroundIsObstacle true localization:=false" />
<arg name="rgb_topic" value="/zed/zed_node/rgb/image_rect_color" />
<arg name="depth_topic" value="/zed/zed_node/depth/depth_registered" />
<arg name="camera_info_topic" value="/zed/zed_node/rgb/camera_info" />
<arg name="depth_camera_info_topic" value="/zed/zed_node/depth/camera_info" />
<arg name="frame_id" value="$(arg frame)" />
<arg name="odom_frame_id" value="odom" />
<arg name="approx_sync" value="false" />
<arg name="visual_odometry" value="false" />
<arg name="rtabmapviz" value="false" />
<arg name="rviz" value="false" />
<arg name="odom_topic" value="/zed/zed_node/odom" />
</include>
</group>
Any help I appreciate it.
URL: http://official-rtab-map-forum.206.s1.nabble.com/ZED2-rtabmap-loop-closure-and-twisted-map-tp6986.html
Dear people.
I took the ZED2 just to play a bit with it 🙂
Just to summarized, the following was installed:
ZED SDK V 3.2.2 for Ubunto 18.04
RtabMap V 0.20.4 (from source)
rtabmap_ros (from source)
Cuada V 11.0
Octomap
zed_wrapper
Among others
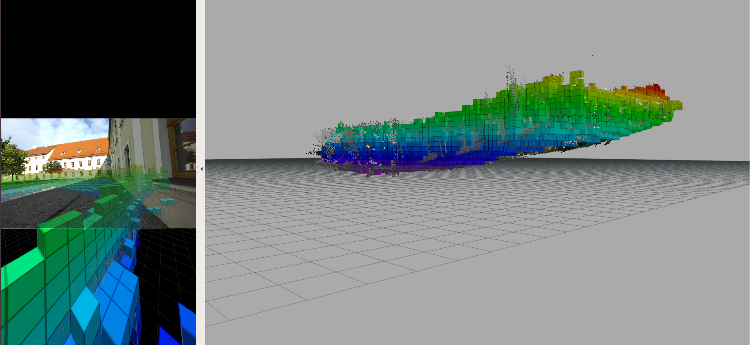
In the figures shown below, the following can be noticed.
1.- The map is shifted a lot before loop closure.
2.- When there is a loop closure the map reminds twisted and not aligned with the floor.
3.- The octomap map on the image is shifted
4.- When the camera is in the same point of view and in already visited place, it does not make a loop closure, the camera needs to move forward and backwards on the same direction till finally it gets a loop closure. In other words, it takes time for the loop closure to happen.
The script I am using is shown as follows.
<arg name="ground_is_obstacle" default="false"/>
<arg name="align_with_ground" default="false"/>
<group ns="/zed/">
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start --Optimizer/GravitySigma 0.3 --Grid/3D true --Grid/RangeMax 7 --Grid/CellSize 0.3 --Grid/GroundIsObstacle true localization:=false" />
<arg name="rgb_topic" value="/zed/zed_node/rgb/image_rect_color" />
<arg name="depth_topic" value="/zed/zed_node/depth/depth_registered" />
<arg name="camera_info_topic" value="/zed/zed_node/rgb/camera_info" />
<arg name="depth_camera_info_topic" value="/zed/zed_node/depth/camera_info" />
<arg name="frame_id" value="$(arg frame)" />
<arg name="odom_frame_id" value="odom" />
<arg name="approx_sync" value="false" />
<arg name="visual_odometry" value="false" />
<arg name="rtabmapviz" value="false" />
<arg name="rviz" value="false" />
<arg name="odom_topic" value="/zed/zed_node/odom" />
</include>
</group>
Any help I appreciate it.
| Free forum by Nabble | Edit this page |