Re: rtabmap with octomap and hector slam
Posted by boon on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696p702.html
I remapped two topics that rtabmap required and I tried,
$ roslaunch rtabmap_ros rgbd_mapping.launch rtabmapviz:=false rtabmap_args:="--delete_db_on_start" rgb_topic:=/camera/rgb/image_raw depth_registered_topic:=/camera/depth/image_raw camera_info_topic:=/camera/rgb/camera_info
I am getting messages on these topics. But when I try,
$ rostopic hz /rtabmap/cloud_map
no pointclould2 messages are being sent in this topic and I cannot see anything in visualization too.
I get a warning,
Input depth type is 32FC1, please use type 16UC1 or mono16 for depth. The depth images will be processed anyway but with a conversion. This warning is only be printed once...
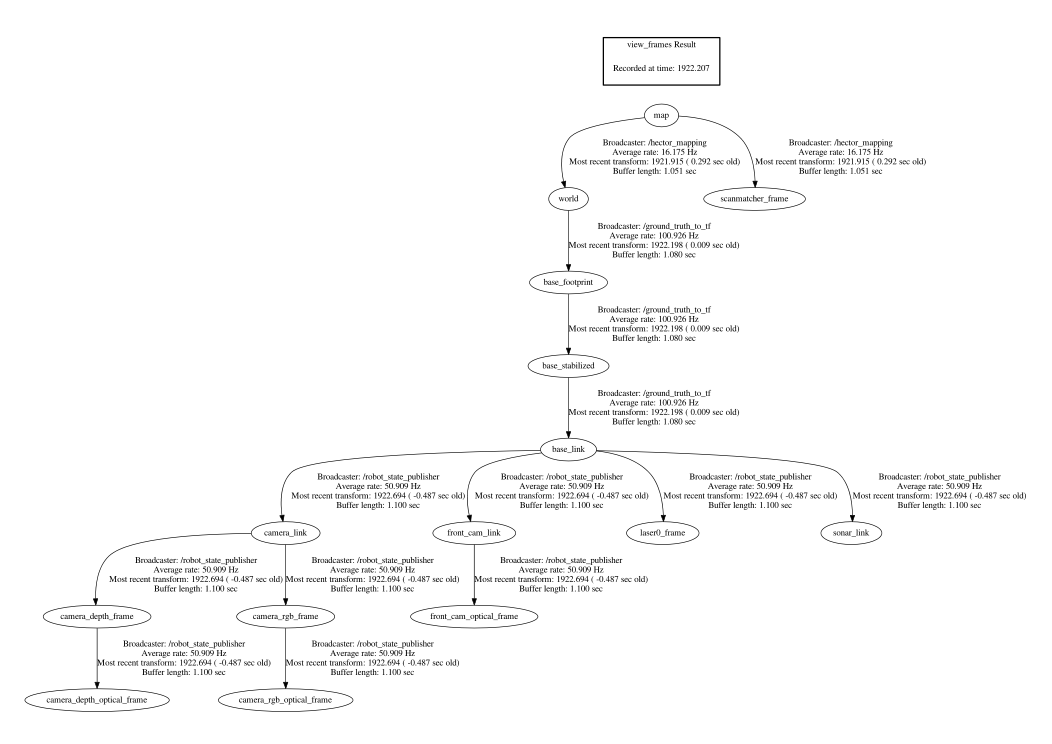
Could not get transform from camera_link to camera_depth_optical_frame after 1 second!
I also get this error:
[rtabmap/rgbd_odometry-1] process has died [pid 29438, exit code -11, cmd /opt/ros/indigo/lib/rtabmap_ros/rgbd_odometry rgb/image:=/camera/rgb/image_raw depth/image:=/camera/depth/image_raw rgb/camera_info:=/camera/rgb/camera_info __name:=rgbd_odometry __log:=/home/boon/.ros/log/6537fdcc-633a-11e5-abfd-678f0acc617a/rtabmap-rgbd_odometry-1.log].
log file: /home/boon/.ros/log/6537fdcc-633a-11e5-abfd-678f0acc617a/rtabmap-rgbd_odometry-1*.log
But when I look for the 'rtabmap-rgbd_odometry-1.log' file, it does not exist
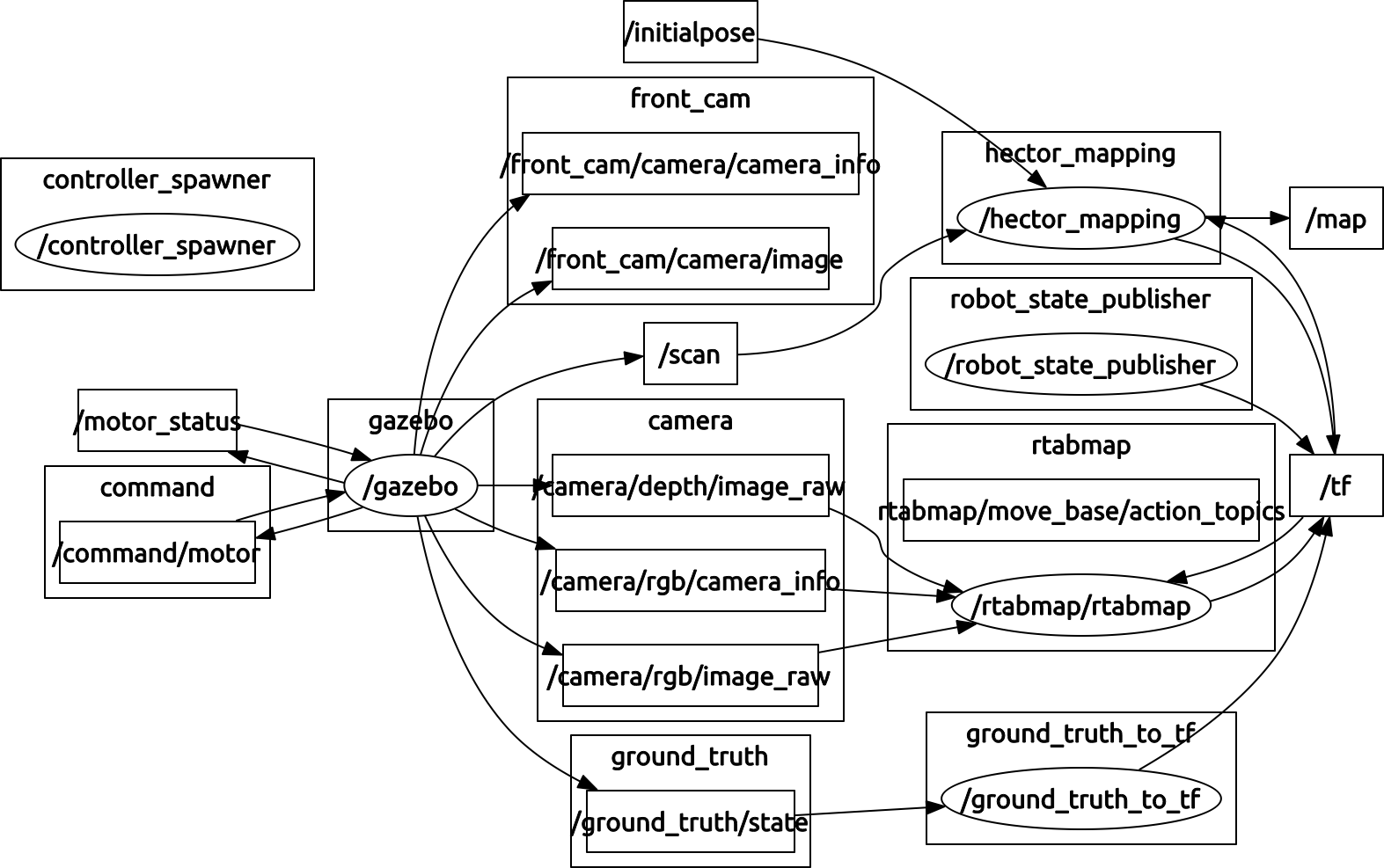
My frames and rqt_graph
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696p702.html
I remapped two topics that rtabmap required and I tried,
$ roslaunch rtabmap_ros rgbd_mapping.launch rtabmapviz:=false rtabmap_args:="--delete_db_on_start" rgb_topic:=/camera/rgb/image_raw depth_registered_topic:=/camera/depth/image_raw camera_info_topic:=/camera/rgb/camera_info
I am getting messages on these topics. But when I try,
$ rostopic hz /rtabmap/cloud_map
no pointclould2 messages are being sent in this topic and I cannot see anything in visualization too.
I get a warning,
Input depth type is 32FC1, please use type 16UC1 or mono16 for depth. The depth images will be processed anyway but with a conversion. This warning is only be printed once...
Could not get transform from camera_link to camera_depth_optical_frame after 1 second!
I also get this error:
[rtabmap/rgbd_odometry-1] process has died [pid 29438, exit code -11, cmd /opt/ros/indigo/lib/rtabmap_ros/rgbd_odometry rgb/image:=/camera/rgb/image_raw depth/image:=/camera/depth/image_raw rgb/camera_info:=/camera/rgb/camera_info __name:=rgbd_odometry __log:=/home/boon/.ros/log/6537fdcc-633a-11e5-abfd-678f0acc617a/rtabmap-rgbd_odometry-1.log].
log file: /home/boon/.ros/log/6537fdcc-633a-11e5-abfd-678f0acc617a/rtabmap-rgbd_odometry-1*.log
But when I look for the 'rtabmap-rgbd_odometry-1.log' file, it does not exist
My frames and rqt_graph
| Free forum by Nabble | Edit this page |