Re: rtabmap with octomap and hector slam
Posted by boon on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696p709.html
I added the following to the quadrotor launch file,
<node pkg="tf" type="static_transform_publisher" name="world_to_map"
args="0.0 0.0 0.0 0.0 0.0 0.0 /world /hector_map 100" />
<node pkg="tf" type="static_transform_publisher" name="scanmatcher_to_base_footprint"
args="0.0 0.0 0.0 0.0 0.0 0.0 /scanmatcher_frame /base_footprint 100" />
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping">
</node>
Is this the correct way to add world to map transform?
I launched rtabmap by,
roslaunch rtabmap_ros rgbd_mapping.launch rtabmapviz:=false rtabmap_args:="--delete_db_on_start" rgb_topic:=/camera/rgb/image_raw depth_registered_topic:=/camera/depth/image_raw camera_info_topic:=/camera/rgb/camera_info visual_odometry:=false odom_topic:=/scanmatch_odom subscribe_scan:=true scan_topic:=/scan
But I found that rtabmap is not subscribing to the /scanmatch_odom published by hector_mapping.
And there is not argument called, 'odom_topic' in 'rgbd_mapping.launch'. Does 'odom_topic' argument is given a different name within rgbd_mapping.launch file?
I get this warning,
Input depth type is 32FC1, please use type 16UC1 or mono16 for depth. The depth images will be processed anyway but with a conversion. This warning is only be printed once...
[ WARN] [1443295482.259304131, 1256.605000000]: Could not get transform from camera_link to camera_depth_optical_frame after 1 second!
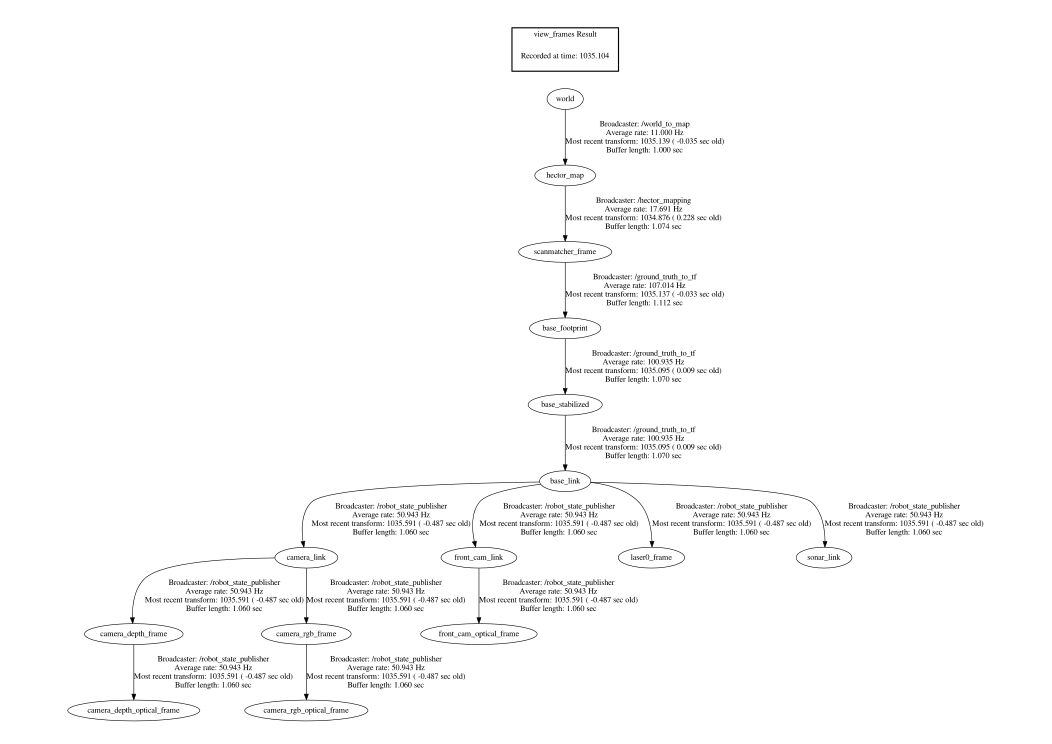
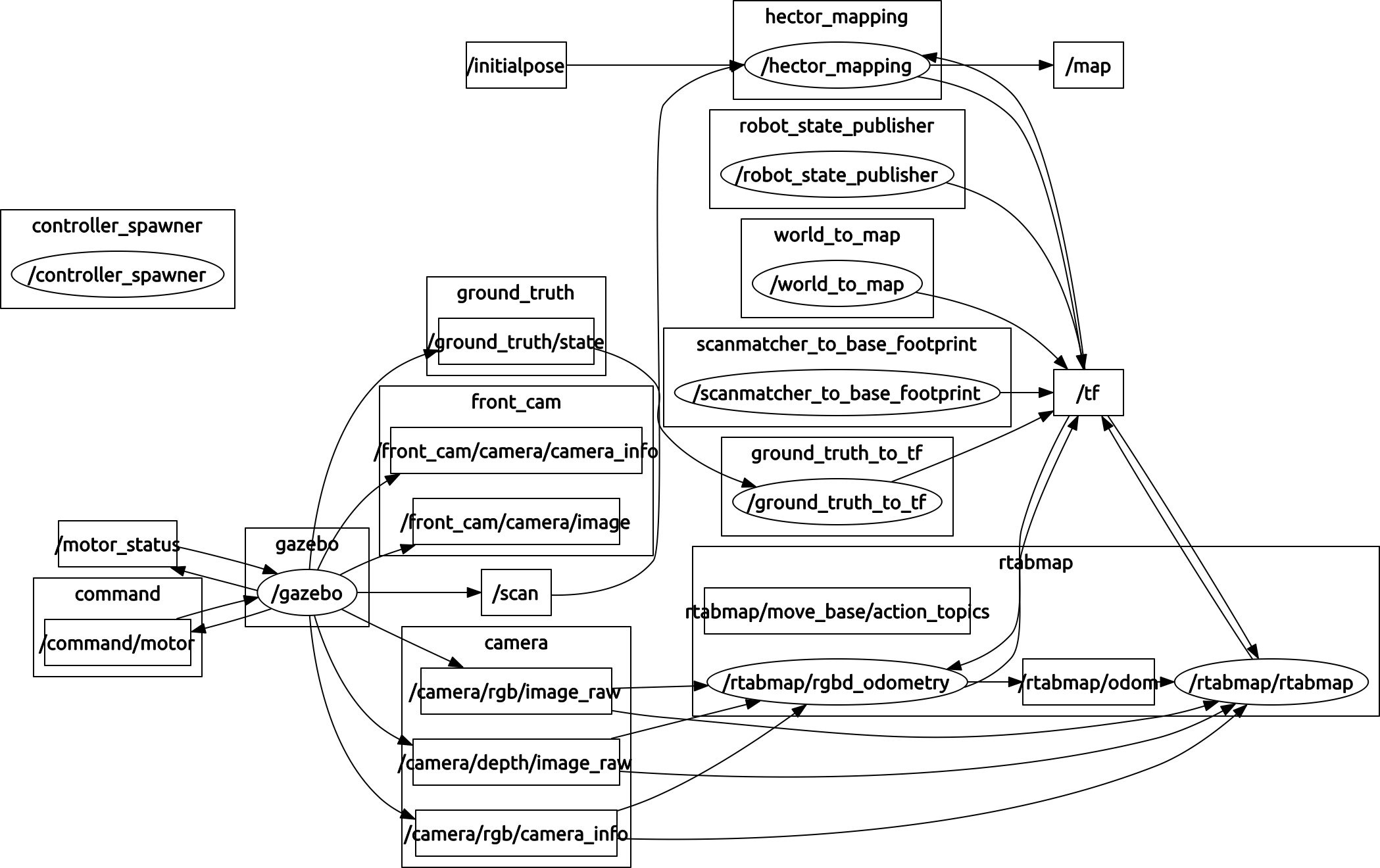
My tf frame and rosgraph
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696p709.html
I added the following to the quadrotor launch file,
<node pkg="tf" type="static_transform_publisher" name="world_to_map"
args="0.0 0.0 0.0 0.0 0.0 0.0 /world /hector_map 100" />
<node pkg="tf" type="static_transform_publisher" name="scanmatcher_to_base_footprint"
args="0.0 0.0 0.0 0.0 0.0 0.0 /scanmatcher_frame /base_footprint 100" />
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping">
</node>
Is this the correct way to add world to map transform?
I launched rtabmap by,
roslaunch rtabmap_ros rgbd_mapping.launch rtabmapviz:=false rtabmap_args:="--delete_db_on_start" rgb_topic:=/camera/rgb/image_raw depth_registered_topic:=/camera/depth/image_raw camera_info_topic:=/camera/rgb/camera_info visual_odometry:=false odom_topic:=/scanmatch_odom subscribe_scan:=true scan_topic:=/scan
But I found that rtabmap is not subscribing to the /scanmatch_odom published by hector_mapping.
And there is not argument called, 'odom_topic' in 'rgbd_mapping.launch'. Does 'odom_topic' argument is given a different name within rgbd_mapping.launch file?
I get this warning,
Input depth type is 32FC1, please use type 16UC1 or mono16 for depth. The depth images will be processed anyway but with a conversion. This warning is only be printed once...
[ WARN] [1443295482.259304131, 1256.605000000]: Could not get transform from camera_link to camera_depth_optical_frame after 1 second!
My tf frame and rosgraph
| Free forum by Nabble | Edit this page |