Re: ZED2 rtabmap loop closure and twisted map
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/ZED2-rtabmap-loop-closure-and-twisted-map-tp6986p7099.html
Dear Mathieu
As you have suggested. I have set Kp/ByteToFloat to false to get better loop closure hypotheses with binary descriptors and also Rtabmap/LoopThr to 0.06 to test more hypotheses.
Since ZED2 has an imu included /zed/zed_node/imu/data, I have feed the imu data to rtabmap.
As you can see in the following .launch
<group ns="/zed/">
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start --Optimizer/GravitySigma 0.3 --Grid/3D true --Grid/RangeMax 7 --Grid/CellSize 0.3 --Grid/GroundIsObstacle true localization:=false --Rtabmap/LoopThr 0.06 --Kp/ByteToFloat false" />
<arg name = "rgb_topic" value = "/zed/zed_node/rgb/image_rect_color" />
<arg name = "depth_topic" value = "/zed/zed_node/depth/depth_registered" />
<arg name = "camera_info_topic" value = "/zed/zed_node/rgb/camera_info" />
<arg name = "depth_camera_info_topic" value = "/zed/zed_node/depth/camera_info" />
<arg name = "frame_id" value = "$(arg frame)" />
<arg name = "odom_frame_id" value = "odom" />
<arg name = "approx_sync" value = "false" />
<arg name = "visual_odometry" value = "false" />
<arg name = "rtabmapviz" value = "false" />
<arg name = "rviz" value = "false" />
<arg name = "odom_topic" value = "/zed/zed_node/odom" />
<arg name = "imu_topic" value = "/zed/zed_node/imu/data"/>
<arg name = "odom_tf_angular_variance" value = "0.001"/>
<arg name = "odom_tf_linear_variance" value = "0.001"/>
</include>
</group>
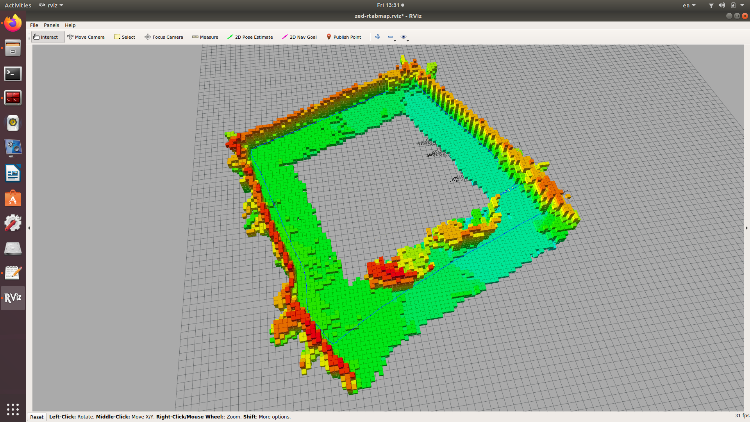
Also as you can see in the following figure, the gap before the loop closure is smaller. But still there is a big gap
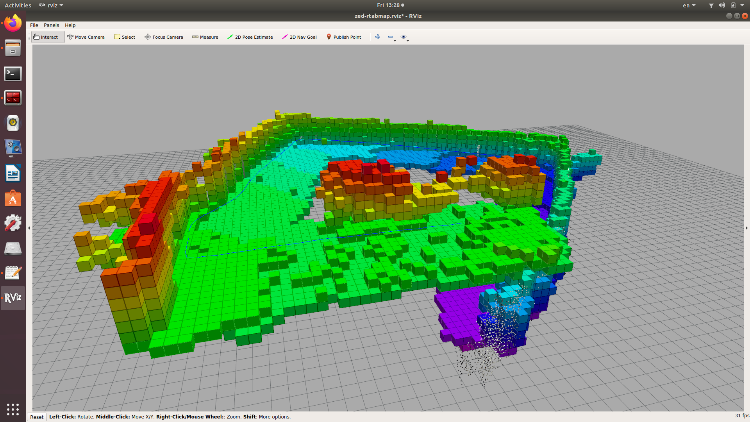
After loop closure the map get much better and also is aligned with the floor but it is rotated with respect to the grid.
Based on the previous I do have the following questions
1.- How can avoid the rotation of the map with the grid?
2.-Where do you see the odometry covariance set to Identity?
3.- Why the odometry covariance set to Identity is quite bad if I want good map optimizations and to reject bad loop closures?
4.-I am using ZED2's odometry as you have mentioned. However what do you suggest to get better odometry?
5 What does the Kp/DetectorStrategy does?
6.- Since ZED2 has barometer, magnetometer, and imu, how good would be to fuse them with kalman filters to get better estimation?
7.-How do you get the plots of the parameters?
Thank you very Much
URL: http://official-rtab-map-forum.206.s1.nabble.com/ZED2-rtabmap-loop-closure-and-twisted-map-tp6986p7099.html
Dear Mathieu
As you have suggested. I have set Kp/ByteToFloat to false to get better loop closure hypotheses with binary descriptors and also Rtabmap/LoopThr to 0.06 to test more hypotheses.
Since ZED2 has an imu included /zed/zed_node/imu/data, I have feed the imu data to rtabmap.
As you can see in the following .launch
<group ns="/zed/">
<include file="$(find rtabmap_ros)/launch/rtabmap.launch">
<arg name="rtabmap_args" value="--delete_db_on_start --Optimizer/GravitySigma 0.3 --Grid/3D true --Grid/RangeMax 7 --Grid/CellSize 0.3 --Grid/GroundIsObstacle true localization:=false --Rtabmap/LoopThr 0.06 --Kp/ByteToFloat false" />
<arg name = "rgb_topic" value = "/zed/zed_node/rgb/image_rect_color" />
<arg name = "depth_topic" value = "/zed/zed_node/depth/depth_registered" />
<arg name = "camera_info_topic" value = "/zed/zed_node/rgb/camera_info" />
<arg name = "depth_camera_info_topic" value = "/zed/zed_node/depth/camera_info" />
<arg name = "frame_id" value = "$(arg frame)" />
<arg name = "odom_frame_id" value = "odom" />
<arg name = "approx_sync" value = "false" />
<arg name = "visual_odometry" value = "false" />
<arg name = "rtabmapviz" value = "false" />
<arg name = "rviz" value = "false" />
<arg name = "odom_topic" value = "/zed/zed_node/odom" />
<arg name = "imu_topic" value = "/zed/zed_node/imu/data"/>
<arg name = "odom_tf_angular_variance" value = "0.001"/>
<arg name = "odom_tf_linear_variance" value = "0.001"/>
</include>
</group>
Also as you can see in the following figure, the gap before the loop closure is smaller. But still there is a big gap
After loop closure the map get much better and also is aligned with the floor but it is rotated with respect to the grid.
Based on the previous I do have the following questions
1.- How can avoid the rotation of the map with the grid?
2.-Where do you see the odometry covariance set to Identity?
3.- Why the odometry covariance set to Identity is quite bad if I want good map optimizations and to reject bad loop closures?
4.-I am using ZED2's odometry as you have mentioned. However what do you suggest to get better odometry?
5 What does the Kp/DetectorStrategy does?
6.- Since ZED2 has barometer, magnetometer, and imu, how good would be to fuse them with kalman filters to get better estimation?
7.-How do you get the plots of the parameters?
Thank you very Much
| Free forum by Nabble | Edit this page |