Re: rtabmap with octomap and hector slam
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696p713.html
Hi boon,
I checked again the demo_hector_mapping.launch file, and the TF tree is:
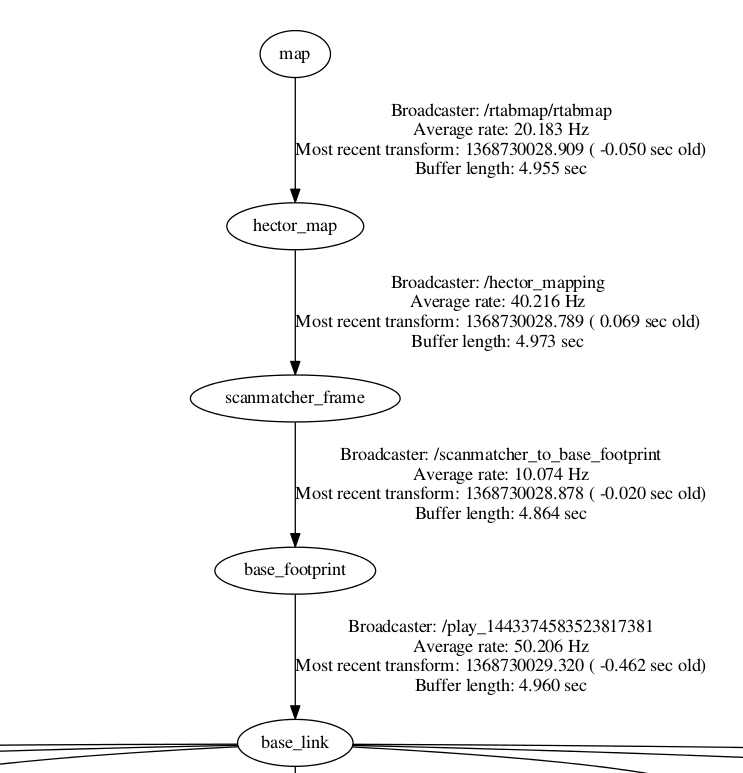
I was wrong, you need "scanmatcher_to_base_footprint" node. However, the "world_to_map" would be:
For the /scan topic, there is maybe an error in rgbd_mapping.launch. I suggest to launch rtabmap in your launch file like that (inspired from demo_hector_mapping.launch):
cheers
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696p713.html
Hi boon,
I checked again the demo_hector_mapping.launch file, and the TF tree is:
I was wrong, you need "scanmatcher_to_base_footprint" node. However, the "world_to_map" would be:
<node pkg="tf" type="static_transform_publisher" name="world_to_map"
args="0.0 0.0 0.0 0.0 0.0 0.0 /world /map 100" />
as rtabmap will publish /map -> /hector_map transform.
For the /scan topic, there is maybe an error in rgbd_mapping.launch. I suggest to launch rtabmap in your launch file like that (inspired from demo_hector_mapping.launch):
<group ns="rtabmap">
<!-- args: "delete_db_on_start" parameter deletes database on start -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="base_footprint"/>
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_laserScan" type="bool" value="true"/>
<!-- Inputs -->
<remap from="odom" to="/scanmatch_odom"/>
<remap from="scan" to="/scan"/>
<remap from="rgb/image" to="/camera/rgb/image_raw"/>
<remap from="depth/image" to="/camera/depth/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<!-- RTAB-Map's parameters -->
<param name="LccIcp/Type" type="string" value="2"/>
<param name="RGBD/OptimizeSlam2D" type="string" value="true"/>
<param name="RGBD/LocalLoopDetectionSpace" type="string" value="true"/>
<param name="LccIcp2/CorrespondenceRatio" type="string" value="0.25"/>
<param name="LccBow/MaxDepth" type="string" value="10.0"/>
<param name="LccBow/InlierDistance" type="string" value="0.1"/>
<param name="LccBow/MinInliers" type="string" value="10"/>
</node>
</group>
cheers
| Free forum by Nabble | Edit this page |