Re: ZED2 rtabmap loop closure and twisted map
Posted by acp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/ZED2-rtabmap-loop-closure-and-twisted-map-tp6986p7130.html
Hi Mathieu
Thank you for your answer
I have tried as you suggested with:
Optimizer/Strategy=1 (g2o) and Optimizer/Strategy=2 (GTSAM) as you can see in the following figures:
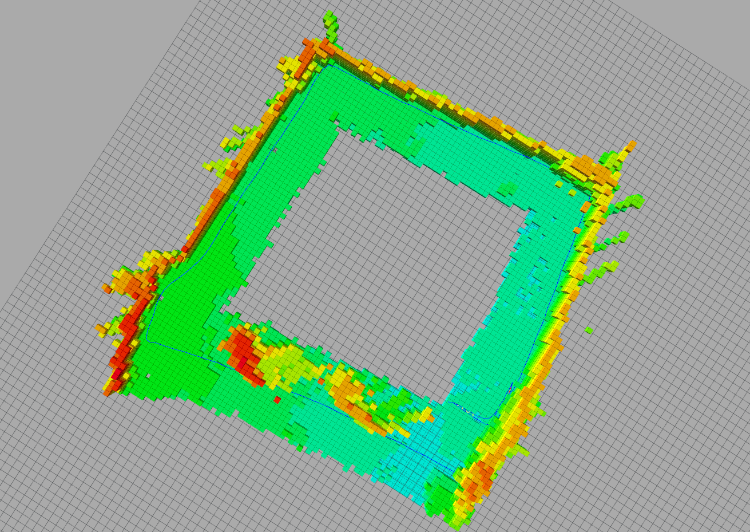
This figure correspond to Optimizer/Strategy=1. I have run it many times and the rotation with respect to the grid is much better than with Optimizer/Strategy=2. However, as you can see the right wall is twisted and also the general map has a small rotation.
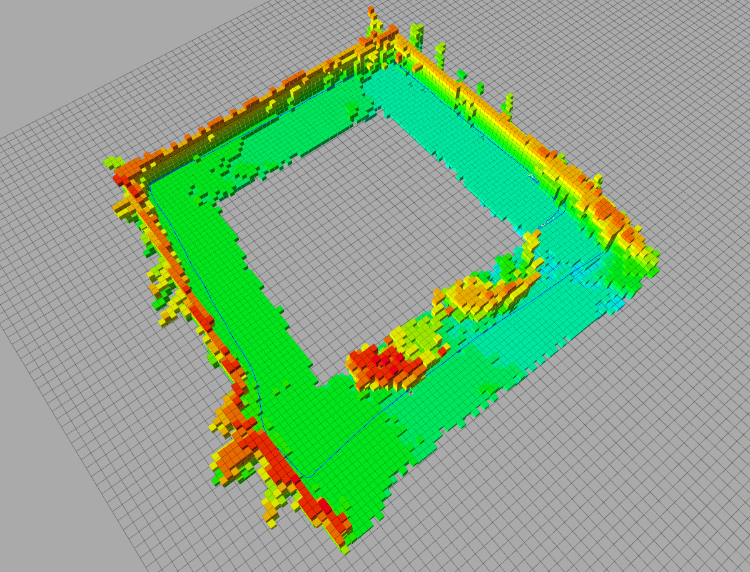
This figure correspond to Optimizer/Strategy=2. I have run it many times and in general looks very good, but there are times where is rotated. The Figure shows a map where the rotation with respect to the grid is practically none.
* How can avoid the map rotates with respect to the grid when using Optimizer/Strategy=2
I have search in Window/Show view also in Window/Preferences
* The madgwick package fuses imu/data_raw with imu/mag and publish imu/data. Thus, ZED2'barometer delivers /atm_press topic whic is the current atmospheric pressure in hPa (hectoPascals).
* I was thinking to use robot_localization package. What do you think? and how shall be done
I am looking forward to your replay.
URL: http://official-rtab-map-forum.206.s1.nabble.com/ZED2-rtabmap-loop-closure-and-twisted-map-tp6986p7130.html
Hi Mathieu
Thank you for your answer
I have tried as you suggested with:
Optimizer/Strategy=1 (g2o) and Optimizer/Strategy=2 (GTSAM) as you can see in the following figures:
This figure correspond to Optimizer/Strategy=1. I have run it many times and the rotation with respect to the grid is much better than with Optimizer/Strategy=2. However, as you can see the right wall is twisted and also the general map has a small rotation.
This figure correspond to Optimizer/Strategy=2. I have run it many times and in general looks very good, but there are times where is rotated. The Figure shows a map where the rotation with respect to the grid is practically none.
* Based on the previous figures, how can avoid the bending of the wall using Optimizer/Strategy=1
* How can avoid the map rotates with respect to the grid when using Optimizer/Strategy=2
I could not find the databaseViewer->Constraint.
I have search in Window/Show view also in Window/Preferences
Which VIO package you recommend, knowing I have ZED2. And, is it possible to have an example or link
OK thank you, but what exactly this parameter does ?
* Do you know how to find out if ZED2 has a quaternion and may already do the estimation and how to use this estimation?
* The madgwick package fuses imu/data_raw with imu/mag and publish imu/data. Thus, ZED2'barometer delivers /atm_press topic whic is the current atmospheric pressure in hPa (hectoPascals).
* I was thinking to use robot_localization package. What do you think? and how shall be done
* I see, I have found it, thank you
I am looking forward to your replay.
| Free forum by Nabble | Edit this page |