waitForTransform error after I modified my camera name.
Posted by TouchDeeper on
URL: http://official-rtab-map-forum.206.s1.nabble.com/waitForTransform-error-after-I-modified-my-camera-name-tp7135.html
Hi, Mathieu
I can run rtabmap normally before in the gazebo. But after I modified my camera name, when I run rtabma_ros , TF can't be lookup normally, error occured like below:
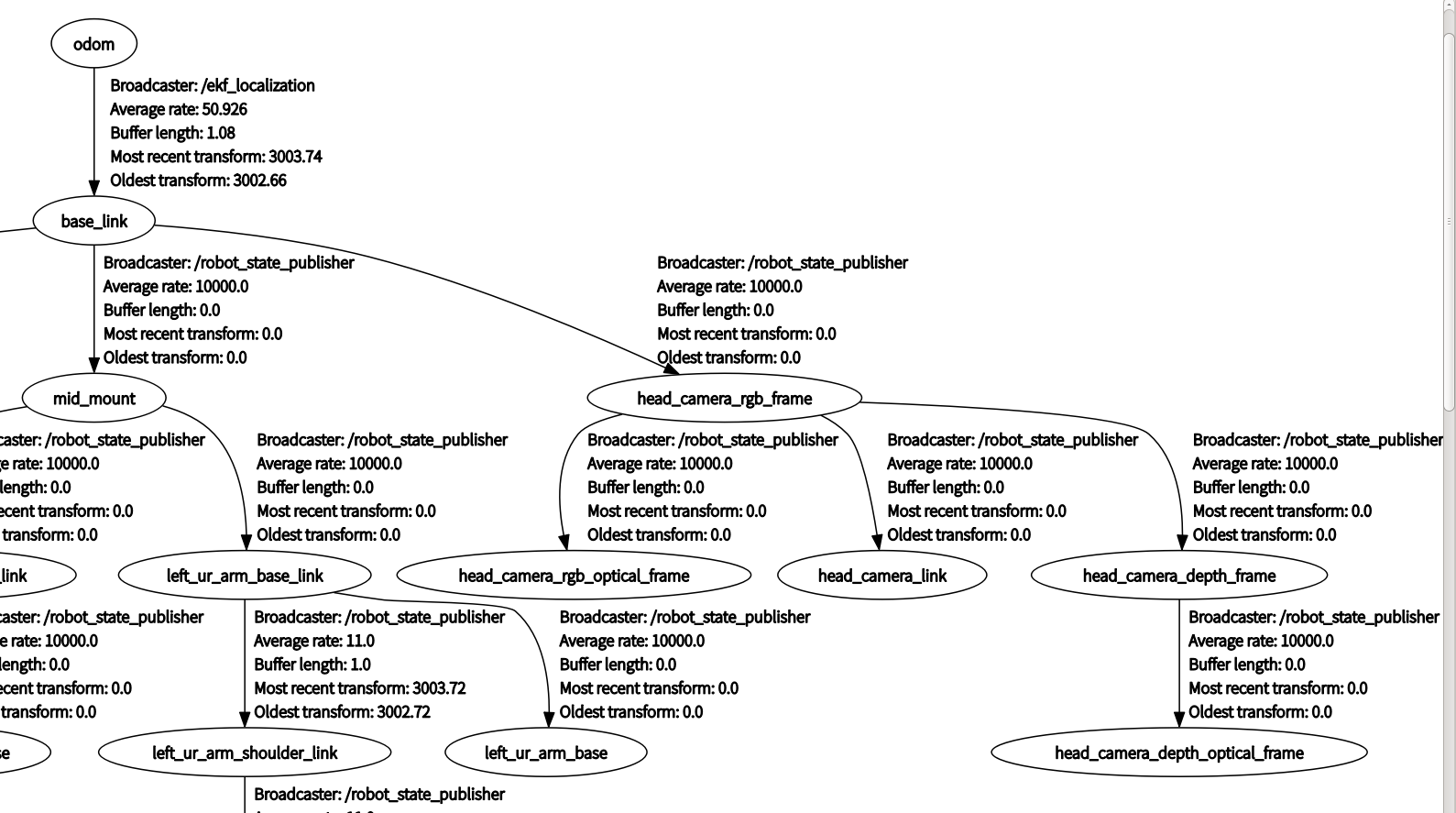
I check my tf tree, it looks like no problem, the part about camera is:
My launch file is:
The runtime output is:
I don't why map did not exist, it worked normally before. As for camera_depth_optical_frame, I have changed it to head_camera_depth_optical_frame as you can see from tf tree. And in launch file, there is no parameters can be set about camera_depth_optical_frame. I don't know what i overlooked. Could you please provide some advice to fix this issue? Thanks a lot.
Best regards,
Tingda
URL: http://official-rtab-map-forum.206.s1.nabble.com/waitForTransform-error-after-I-modified-my-camera-name-tp7135.html
Hi, Mathieu
I can run rtabmap normally before in the gazebo. But after I modified my camera name, when I run rtabma_ros , TF can't be lookup normally, error occured like below:
ros.costmap_2d: Timed out waiting for transform from base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 3512.74 timeout was 0.1.
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3515.226000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
I check my tf tree, it looks like no problem, the part about camera is:
My launch file is:
<launch>
<arg name="database_path" default="rtabmap.db"/>
<arg name="rgbd_odometry" default="false"/>
<arg name="rtabmapviz" default="false"/>
<arg name="localization" default="false"/>
<arg name="simulation" default="false"/>
<arg name="sw_registered" default="false"/>
<arg if="$(arg localization)" name="args" default=""/>
<arg unless="$(arg localization)" name="args" default="--delete_db_on_start"/>
<arg if="$(arg simulation)" name="rgb_topic" default="/head_camera/rgb/image_raw"/>
<arg unless="$(arg simulation)" name="rgb_topic" default="/head_camera/rgb/image_rect_color"/>
<arg if="$(arg simulation)" name="depth_topic" default="/head_camera/depth/image_raw"/>
<arg unless="$(arg simulation)" name="depth_topic" default="/head_camera/depth_registered/image_raw"/>
<arg name="camera_info_topic" default="/head_camera/rgb/camera_info"/>
<arg name="wait_for_transform" default="0.2"/>
<!--
robot_state_publisher's publishing frequency in "turtlebot_bringup/launch/includes/robot.launch.xml"
can be increase from 5 to 10 Hz to avoid some TF warnings.
-->
<!-- Fake laser -->
<node pkg="nodelet" type="nodelet" name="laserscan_nodelet_manager" args="manager"/>
<node pkg="nodelet" type="nodelet" name="depthimage_to_laserscan"
args="load depthimage_to_laserscan/DepthImageToLaserScanNodelet laserscan_nodelet_manager">
<param name="scan_height" value="10"/>
<param name="output_frame_id" value="/head_camera_depth_frame"/>
<param name="range_min" value="0.45"/>
<remap from="image" to="/head_camera/depth/image_raw"/>
<remap from="scan" to="/scan"/>
</node>
<!-- Navigation stuff (move_base) -->
<include unless="$(arg simulation)" file="$(find betago_navigation)/launch/3dsensor.launch">
<arg if="$(arg sw_registered)" name="depth_registration" value="false"/>
<arg unless="$(arg sw_registered)" name="depth_registration" value="true"/>
</include>
<!-- Move base -->
<include file="$(find ridgeback_navigation)/launch/include/move_base.launch" />
<!-- Mapping -->
<group ns="rtabmap">
<!-- Use RGBD synchronization -->
<!-- Here is a general example using a standalone nodelet,
but it is recommended to attach this nodelet to nodelet
manager of the camera to avoid topic serialization -->
<node pkg="nodelet" type="nodelet" name="rgbd_sync" args="standalone rtabmap_ros/rgbd_sync" output="screen">
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
<remap from="rgbd_image" to="rgbd_image"/> <!-- output -->
<!-- Should be true for not synchronized camera topics
(e.g., false for simulation, kinectv2, zed, realsense, true for xtion, kinect360)-->
<param name="approx_sync" value="false"/>
</node>
<!-- Odometry -->
<node pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen">
<param name="subscribe_rgbd" type="bool" value="true"/>
<param name="frame_id" type="string" value="base_link"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
<remap from="rgbd_image" to="rgbd_image"/>
</node>
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="database_path" type="string" value="$(arg database_path)"/>
<param name="frame_id" type="string" value="base_link"/>
<param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/>
<!-- <param name="subscribe_depth" type="bool" value="true"/>-->
<param name="subscribe_scan" type="bool" value="true"/>
<param name="subscribe_depth" type="bool" value="false"/>
<param name="subscribe_rgbd" type="bool" value="true"/>
<param name="map_always_update" type="bool" value="true"/>
<!-- inputs -->
<remap from="scan" to="/scan"/>
<!-- <remap from="rgb/image" to="$(arg rgb_topic)"/>-->
<!-- <remap from="depth/image" to="$(arg depth_topic)"/>-->
<!-- <remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>-->
<!-- <remap unless="$(arg rgbd_odometry)" from="odom" to="/odometry/filtered"/>-->
<remap from="odom" to="odom"/>
<remap from="rgbd_image" to="rgbd_image"/>
<param name="queue_size" type="int" value="10"/>
<param name="approx_sync" type="bool" value="false"/>
<!-- output -->
<remap from="grid_map" to="/map"/>
<!-- RTAB-Map's parameters: do "rosrun rtabmap rtabmap (double-dash)params" to see the list of available parameters. -->
<!-- <param name="RGBD/ProximityBySpace" type="string" value="true"/> <!– Local loop closure detection (using estimated position) with locations in WM –>-->
<param name="RGBD/OptimizeFromGraphEnd" type="string" value="false"/> <!-- Set to false to generate map correction between /map and /odom -->
<!-- <param name="Kp/MaxDepth" type="string" value="4.0"/>-->
<!-- <param name="Reg/Strategy" type="string" value="0"/> <!– Loop closure transformation: 0=Visual, 1=ICP, 2=Visual+ICP –>-->
<!-- <param name="Icp/CorrespondenceRatio" type="string" value="0.3"/>-->
<!-- <param name="Vis/MinInliers" type="string" value="15"/> <!– 3D visual words minimum inliers to accept loop closure –>-->
<!-- <param name="Vis/InlierDistance" type="string" value="0.1"/> <!– 3D visual words correspondence distance –>-->
<param name="RGBD/AngularUpdate" type="string" value="0.1"/> <!-- Update map only if the robot is moving -->
<param name="RGBD/LinearUpdate" type="string" value="0.1"/> <!-- Update map only if the robot is moving -->
<!-- <param name="RGBD/ProximityPathMaxNeighbors" type="string" value="0"/> -->
<!-- <param name="Rtabmap/TimeThr" type="string" value="700"/>-->
<!-- <param name="Mem/RehearsalSimilarity" type="string" value="0.30"/>-->
<!-- <param name="Reg/Force3DoF" type="string" value="true"/>-->
<!-- <param name="Grid/FromDepth" type="string" value="true"/>-->
<!-- <param name="GridGlobal/MinSize" type="string" value="20"/>-->
<!-- <param name="RGBD/OptimizeMaxError" type="string" value="0.1"/>-->
<!-- localization mode -->
<param if="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="false"/>
<param unless="$(arg localization)" name="Mem/IncrementalMemory" type="string" value="true"/>
<param name="Mem/InitWMWithAllNodes" type="string" value="$(arg localization)"/>
</node>
<!-- Odometry : ONLY for testing without the actual robot! /odom TF should not be already published. -->
<node if="$(arg rgbd_odometry)" pkg="rtabmap_ros" type="rgbd_odometry" name="rgbd_odometry" output="screen">
<param name="frame_id" type="string" value="base_link"/>
<param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/>
<param name="Reg/Force3DoF" type="string" value="true"/>
<param name="Vis/InlierDistance" type="string" value="0.05"/>
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
</node>
<!-- visualization with rtabmapviz -->
<node if="$(arg rtabmapviz)" pkg="rtabmap_ros" type="rtabmapviz" name="rtabmapviz" args="-d $(find rtabmap_ros)/launch/config/rgbd_gui.ini" output="screen">
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_scan" type="bool" value="true"/>
<param name="frame_id" type="string" value="base_link"/>
<param name="wait_for_transform_duration" type="double" value="$(arg wait_for_transform)"/>
<remap from="rgb/image" to="$(arg rgb_topic)"/>
<remap from="depth/image" to="$(arg depth_topic)"/>
<remap from="rgb/camera_info" to="$(arg camera_info_topic)"/>
<remap from="scan" to="/scan"/>
</node>
</group>
</launch>
The runtime output is:
SUMMARY
========
PARAMETERS
* /depthimage_to_laserscan/output_frame_id: /head_camera_dept...
* /depthimage_to_laserscan/range_min: 0.45
* /depthimage_to_laserscan/scan_height: 10
* /move_base/TrajectoryPlannerROS/acc_lim_theta: 20.0
* /move_base/TrajectoryPlannerROS/acc_lim_x: 10.0
* /move_base/TrajectoryPlannerROS/acc_lim_y: 10.0
* /move_base/TrajectoryPlannerROS/angular_sim_granularity: 0.02
* /move_base/TrajectoryPlannerROS/controller_frequency: 20.0
* /move_base/TrajectoryPlannerROS/dwa: True
* /move_base/TrajectoryPlannerROS/escape_reset_dist: 0.1
* /move_base/TrajectoryPlannerROS/escape_reset_theta: 0.1
* /move_base/TrajectoryPlannerROS/escape_vel: -0.5
* /move_base/TrajectoryPlannerROS/gdist_scale: 1.0
* /move_base/TrajectoryPlannerROS/heading_lookahead: 0.325
* /move_base/TrajectoryPlannerROS/heading_scoring: False
* /move_base/TrajectoryPlannerROS/heading_scoring_timestep: 0.8
* /move_base/TrajectoryPlannerROS/holonomic_robot: True
* /move_base/TrajectoryPlannerROS/latch_xy_goal_tolerance: False
* /move_base/TrajectoryPlannerROS/max_vel_theta: 1.57
* /move_base/TrajectoryPlannerROS/max_vel_x: 0.5
* /move_base/TrajectoryPlannerROS/max_vel_y: 0.5
* /move_base/TrajectoryPlannerROS/meter_scoring: True
* /move_base/TrajectoryPlannerROS/min_in_place_vel_theta: 0.314
* /move_base/TrajectoryPlannerROS/min_vel_theta: -1.57
* /move_base/TrajectoryPlannerROS/min_vel_x: 0.1
* /move_base/TrajectoryPlannerROS/min_vel_y: 0.1
* /move_base/TrajectoryPlannerROS/occdist_scale: 0.1
* /move_base/TrajectoryPlannerROS/oscillation_reset_dist: 0.05
* /move_base/TrajectoryPlannerROS/pdist_scale: 0.75
* /move_base/TrajectoryPlannerROS/publish_cost_grid_pc: True
* /move_base/TrajectoryPlannerROS/sim_granularity: 0.02
* /move_base/TrajectoryPlannerROS/sim_time: 2.0
* /move_base/TrajectoryPlannerROS/simple_attractor: False
* /move_base/TrajectoryPlannerROS/vtheta_samples: 20
* /move_base/TrajectoryPlannerROS/vx_samples: 6
* /move_base/TrajectoryPlannerROS/xy_goal_tolerance: 0.25
* /move_base/TrajectoryPlannerROS/yaw_goal_tolerance: 0.157
* /move_base/base_global_planner: navfn/NavfnROS
* /move_base/base_local_planner: base_local_planne...
* /move_base/clearing_rotation_allowed: True
* /move_base/controller_frequency: 20.0
* /move_base/controller_patience: 15.0
* /move_base/global_costmap/footprint: [[0.48, -0.4], [0...
* /move_base/global_costmap/footprint_padding: 0.1
* /move_base/global_costmap/global_frame: map
* /move_base/global_costmap/height: 40.0
* /move_base/global_costmap/inflater_layer/inflation_radius: 0.25
* /move_base/global_costmap/map_type: costmap
* /move_base/global_costmap/meter_scoring: True
* /move_base/global_costmap/obstacle_range: 2.5
* /move_base/global_costmap/obstacles_layer/observation_sources: scan
* /move_base/global_costmap/obstacles_layer/scan/clearing: True
* /move_base/global_costmap/obstacles_layer/scan/data_type: LaserScan
* /move_base/global_costmap/obstacles_layer/scan/marking: True
* /move_base/global_costmap/obstacles_layer/scan/max_obstacle_height: 2.0
* /move_base/global_costmap/obstacles_layer/scan/min_obstacle_height: -2.0
* /move_base/global_costmap/obstacles_layer/scan/obstacle_range: 2.5
* /move_base/global_costmap/obstacles_layer/scan/raytrace_range: 3.0
* /move_base/global_costmap/obstacles_layer/scan/sensor_frame: front_laser
* /move_base/global_costmap/obstacles_layer/scan/topic: front/scan
* /move_base/global_costmap/origin_x: -20.0
* /move_base/global_costmap/origin_y: -20.0
* /move_base/global_costmap/origin_z: 0.0
* /move_base/global_costmap/plugins: [{'type': 'costma...
* /move_base/global_costmap/publish_frequency: 5.0
* /move_base/global_costmap/publish_voxel_map: False
* /move_base/global_costmap/raytrace_range: 3.0
* /move_base/global_costmap/resolution: 0.05
* /move_base/global_costmap/robot_base_frame: base_link
* /move_base/global_costmap/rolling_window: False
* /move_base/global_costmap/static_map: True
* /move_base/global_costmap/transform_tolerance: 0.5
* /move_base/global_costmap/update_frequency: 20.0
* /move_base/global_costmap/width: 40.0
* /move_base/global_costmap/z_resolution: 1
* /move_base/global_costmap/z_voxels: 2
* /move_base/local_costmap/footprint: [[0.48, -0.4], [0...
* /move_base/local_costmap/footprint_padding: 0.1
* /move_base/local_costmap/global_frame: map
* /move_base/local_costmap/height: 10.0
* /move_base/local_costmap/inflater_layer/inflation_radius: 0.25
* /move_base/local_costmap/map_type: costmap
* /move_base/local_costmap/meter_scoring: True
* /move_base/local_costmap/obstacle_range: 2.5
* /move_base/local_costmap/obstacles_layer/observation_sources: scan
* /move_base/local_costmap/obstacles_layer/scan/clearing: True
* /move_base/local_costmap/obstacles_layer/scan/data_type: LaserScan
* /move_base/local_costmap/obstacles_layer/scan/marking: True
* /move_base/local_costmap/obstacles_layer/scan/max_obstacle_height: 2.0
* /move_base/local_costmap/obstacles_layer/scan/min_obstacle_height: -2.0
* /move_base/local_costmap/obstacles_layer/scan/obstacle_range: 2.5
* /move_base/local_costmap/obstacles_layer/scan/raytrace_range: 3.0
* /move_base/local_costmap/obstacles_layer/scan/sensor_frame: front_laser
* /move_base/local_costmap/obstacles_layer/scan/topic: front/scan
* /move_base/local_costmap/origin_z: 0.0
* /move_base/local_costmap/plugins: [{'type': 'costma...
* /move_base/local_costmap/publish_frequency: 5.0
* /move_base/local_costmap/publish_voxel_map: False
* /move_base/local_costmap/raytrace_range: 3.0
* /move_base/local_costmap/resolution: 0.05
* /move_base/local_costmap/robot_base_frame: base_link
* /move_base/local_costmap/rolling_window: True
* /move_base/local_costmap/static_map: False
* /move_base/local_costmap/transform_tolerance: 0.5
* /move_base/local_costmap/update_frequency: 20.0
* /move_base/local_costmap/width: 10.0
* /move_base/local_costmap/z_resolution: 1
* /move_base/local_costmap/z_voxels: 2
* /move_base/oscillation_distance: 0.5
* /move_base/oscillation_timeout: 0.0
* /move_base/planner_frequency: 20.0
* /move_base/planner_patience: 5.0
* /move_base/recovery_behavior_enabled: True
* /move_base/shutdown_costmaps: False
* /rosdistro: kinetic
* /rosversion: 1.12.16
* /rtabmap/rgbd_odometry/Reg/Force3DoF: true
* /rtabmap/rgbd_odometry/frame_id: base_link
* /rtabmap/rgbd_odometry/subscribe_rgbd: True
* /rtabmap/rgbd_sync/approx_sync: False
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/Mem/InitWMWithAllNodes: false
* /rtabmap/rtabmap/RGBD/AngularUpdate: 0.1
* /rtabmap/rtabmap/RGBD/LinearUpdate: 0.1
* /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: false
* /rtabmap/rtabmap/approx_sync: False
* /rtabmap/rtabmap/database_path: rtabmap.db
* /rtabmap/rtabmap/frame_id: base_link
* /rtabmap/rtabmap/map_always_update: True
* /rtabmap/rtabmap/queue_size: 10
* /rtabmap/rtabmap/subscribe_depth: False
* /rtabmap/rtabmap/subscribe_rgbd: True
* /rtabmap/rtabmap/subscribe_scan: True
* /rtabmap/rtabmap/wait_for_transform_duration: 0.2
NODES
/rtabmap/
rgbd_odometry (rtabmap_ros/rgbd_odometry)
rgbd_sync (nodelet/nodelet)
rtabmap (rtabmap_ros/rtabmap)
/
depthimage_to_laserscan (nodelet/nodelet)
laserscan_nodelet_manager (nodelet/nodelet)
move_base (move_base/move_base)
ROS_MASTER_URI=http://localhost:11311
process[laserscan_nodelet_manager-1]: started with pid [10811]
process[depthimage_to_laserscan-2]: started with pid [10812]
process[move_base-3]: started with pid [10862]
ros.costmap_2d: Timed out waiting for transform from base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 3512.74 timeout was 0.1.
process[rtabmap/rgbd_sync-4]: started with pid [10920]
type is rtabmap_ros/rgbd_sync
ros.rtabmap_ros./rtabmap/rgbd_sync: /rtabmap/rgbd_sync: approx_sync = false
ros.rtabmap_ros./rtabmap/rgbd_sync: /rtabmap/rgbd_sync: queue_size = 10
ros.rtabmap_ros./rtabmap/rgbd_sync: /rtabmap/rgbd_sync: depth_scale = 1.000000
ros.rtabmap_ros./rtabmap/rgbd_sync: /rtabmap/rgbd_sync: decimation = 1
ros.rtabmap_ros./rtabmap/rgbd_sync: /rtabmap/rgbd_sync: compressed_rate = 0.000000
ros.rtabmap_ros./rtabmap/rgbd_sync:
/rtabmap/rgbd_sync subscribed to (exact sync):
/head_camera/rgb/image_raw,
/head_camera/depth/image_raw,
/head_camera/rgb/camera_info
process[rtabmap/rgbd_odometry-5]: started with pid [10999]
ros.nodelet: Initializing nodelet with 6 worker threads.
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: frame_id = base_link
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: odom_frame_id = odom
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: publish_tf = true
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: wait_for_transform = true
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: wait_for_transform_duration = 0.100000
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: ground_truth_frame_id =
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: ground_truth_base_frame_id = base_link
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: config_path =
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: publish_null_when_lost = true
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: guess_frame_id =
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: guess_min_translation = 0.000000
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: guess_min_rotation = 0.000000
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: guess_min_time = 0.000000
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: expected_update_rate = 0.000000 Hz
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: max_update_rate = 0.000000 Hz
ros.rtabmap_ros./rtabmap/rgbd_odometry: Odometry: wait_imu_to_init = false
ros.rtabmap_ros: Odometry: stereoParams_=0 visParams_=1 icpParams_=0
process[rtabmap/rtabmap-6]: started with pid [11083]
ros.rtabmap_ros: Starting node...
ros.nodelet: Initializing nodelet with 6 worker threads.
ros.rtabmap_ros: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
ros.rtabmap_ros: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
ros.rtabmap_ros: /rtabmap/rtabmap(maps): map_cleanup = true
ros.rtabmap_ros: /rtabmap/rtabmap(maps): map_always_update = true
ros.rtabmap_ros: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
ros.rtabmap_ros: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
ros.rtabmap_ros: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
ros.rtabmap_ros: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
ros.rtabmap_ros: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
ros.rtabmap_ros./rtabmap/rtabmap: rtabmap: frame_id = base_link
ros.rtabmap_ros./rtabmap/rtabmap: rtabmap: map_frame_id = map
ros.rtabmap_ros./rtabmap/rtabmap: rtabmap: use_action_for_goal = false
ros.rtabmap_ros./rtabmap/rtabmap: rtabmap: tf_delay = 0.050000
ros.rtabmap_ros./rtabmap/rtabmap: rtabmap: tf_tolerance = 0.100000
ros.rtabmap_ros./rtabmap/rtabmap: rtabmap: odom_sensor_sync = false
ros.rtabmap_ros./rtabmap/rgbd_odometry: Setting odometry parameter "Reg/Force3DoF"="true"
ros.rtabmap_ros./rtabmap/rtabmap: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
ros.rtabmap_ros./rtabmap/rtabmap: Setting RTAB-Map parameter "Mem/InitWMWithAllNodes"="false"
ros.rtabmap_ros./rtabmap/rgbd_odometry: RGBDOdometry: approx_sync = true
ros.rtabmap_ros./rtabmap/rgbd_odometry: RGBDOdometry: queue_size = 5
ros.rtabmap_ros./rtabmap/rgbd_odometry: RGBDOdometry: subscribe_rgbd = true
ros.rtabmap_ros./rtabmap/rgbd_odometry: RGBDOdometry: rgbd_cameras = 1
ros.rtabmap_ros./rtabmap/rgbd_odometry:
/rtabmap/rgbd_odometry subscribed to:
/rtabmap/rgbd_image
ros.rtabmap_ros./rtabmap/rtabmap: Setting RTAB-Map parameter "RGBD/AngularUpdate"="0.1"
ros.rtabmap_ros./rtabmap/rtabmap: Setting RTAB-Map parameter "RGBD/LinearUpdate"="0.1"
ros.rtabmap_ros./rtabmap/rtabmap: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="false"
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3515.226000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3515.326000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3515.475000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3515.575000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3515.676000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rtabmap: Setting "Grid/FromDepth" parameter to false (default true) as "subscribe_scan" or "subscribe_scan_cloud" is true. The occupancy grid map will be constructed from laser scans. To get occupancy grid map from cloud projection, set "Grid/FromDepth" to true. To suppress this warning, add <param name="Grid/FromDepth" type="string" value="false"/>
ros.rtabmap_ros./rtabmap/rtabmap: Setting "Grid/RangeMax" parameter to 0 (default 5.000000) as "subscribe_scan" or "subscribe_scan_cloud" is true.
ros.rtabmap_ros./rtabmap/rtabmap: RTAB-Map detection rate = 1.000000 Hz
ros.rtabmap_ros./rtabmap/rtabmap: rtabmap: Deleted database "/home/wang/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
ros.rtabmap_ros./rtabmap/rtabmap: rtabmap: Using database from "/home/wang/.ros/rtabmap.db" (0 MB).
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3515.825000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3515.925000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3516.026000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rtabmap: rtabmap: Database version = "0.20.0".
ros.rtabmap_ros: rtabmap: Parameters subscribe_rgb and subscribe_rgbd cannot be true at the same time. Parameter subscribe_rgb is set to false.
ros.rtabmap_ros: /rtabmap/rtabmap: subscribe_depth = false
ros.rtabmap_ros: /rtabmap/rtabmap: subscribe_rgb = false
ros.rtabmap_ros: /rtabmap/rtabmap: subscribe_stereo = false
ros.rtabmap_ros: /rtabmap/rtabmap: subscribe_rgbd = true (rgbd_cameras=1)
ros.rtabmap_ros: /rtabmap/rtabmap: subscribe_odom_info = false
ros.rtabmap_ros: /rtabmap/rtabmap: subscribe_user_data = false
ros.rtabmap_ros: /rtabmap/rtabmap: subscribe_scan = true
ros.rtabmap_ros: /rtabmap/rtabmap: subscribe_scan_cloud = false
ros.rtabmap_ros: /rtabmap/rtabmap: subscribe_scan_descriptor = false
ros.rtabmap_ros: /rtabmap/rtabmap: queue_size = 10
ros.rtabmap_ros: /rtabmap/rtabmap: approx_sync = false
ros.rtabmap_ros: Setup rgbd callback
ros.rtabmap_ros:
/rtabmap/rtabmap subscribed to (exact sync):
/rtabmap/odom,
/rtabmap/rgbd_image,
/scan
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3516.175000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3516.275000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3516.375000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.101 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3516.475000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros: rtabmap 0.20.0 started...
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3516.576000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3516.726000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3516.875000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3516.975000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.101 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3517.075000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3517.175000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.101 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3517.275000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3517.376000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.101 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3517.476000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3517.625000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.costmap_2d: Timed out waiting for transform from base_link to map to become available before running costmap, tf error: canTransform: target_frame map does not exist.. canTransform returned after 0.101 timeout was 0.1.
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3517.725000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3517.825000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.102 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3517.926000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3518.076000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3518.225000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3518.326000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3518.475000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3518.575000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3518.675000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3518.775000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3518.875000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3518.975000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3519.075000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3519.176000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3519.325000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3519.425000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3519.526000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
ros.rtabmap_ros./rtabmap/rgbd_odometry: odometry: Could not get transform from base_link to camera_depth_optical_frame (stamp=3519.627000) after 0.100000 seconds ("wait_for_transform_duration"=0.100000)! Error="canTransform: source_frame camera_depth_optical_frame does not exist.. canTransform returned after 0.1 timeout was 0.1."
I don't why map did not exist, it worked normally before. As for camera_depth_optical_frame, I have changed it to head_camera_depth_optical_frame as you can see from tf tree. And in launch file, there is no parameters can be set about camera_depth_optical_frame. I don't know what i overlooked. Could you please provide some advice to fix this issue? Thanks a lot.
Best regards,
Tingda
| Free forum by Nabble | Edit this page |