Re: rtabmap with octomap and hector slam
Posted by boon on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696p714.html
I updated the launch file as follows,
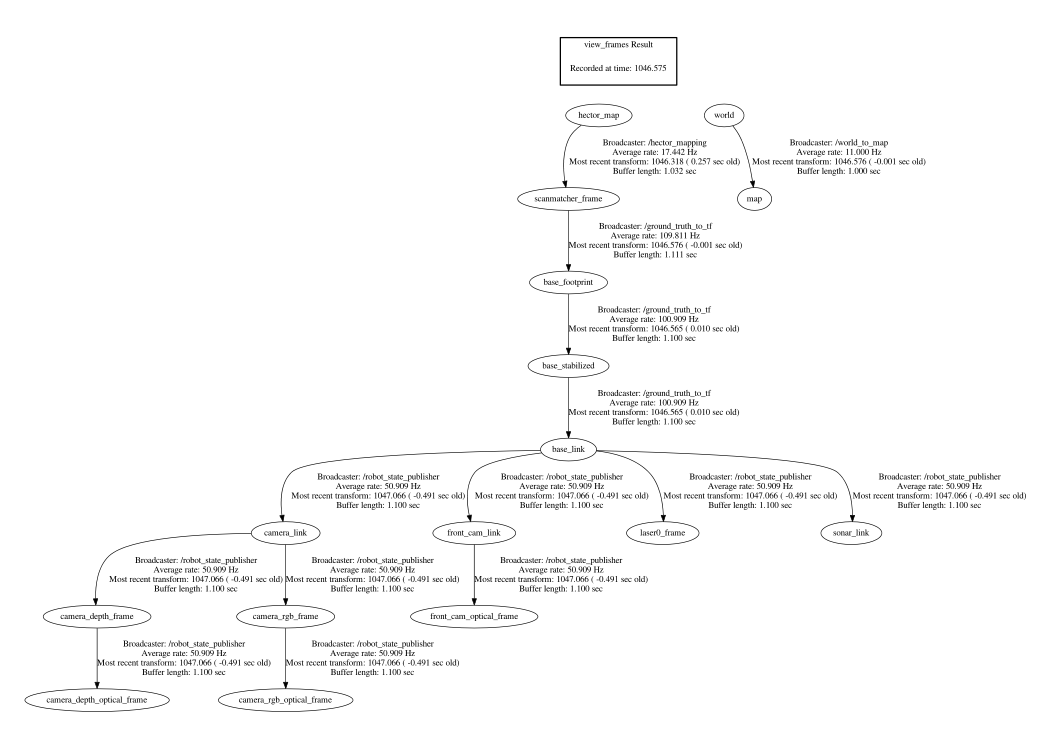
The tf and rosgraph,
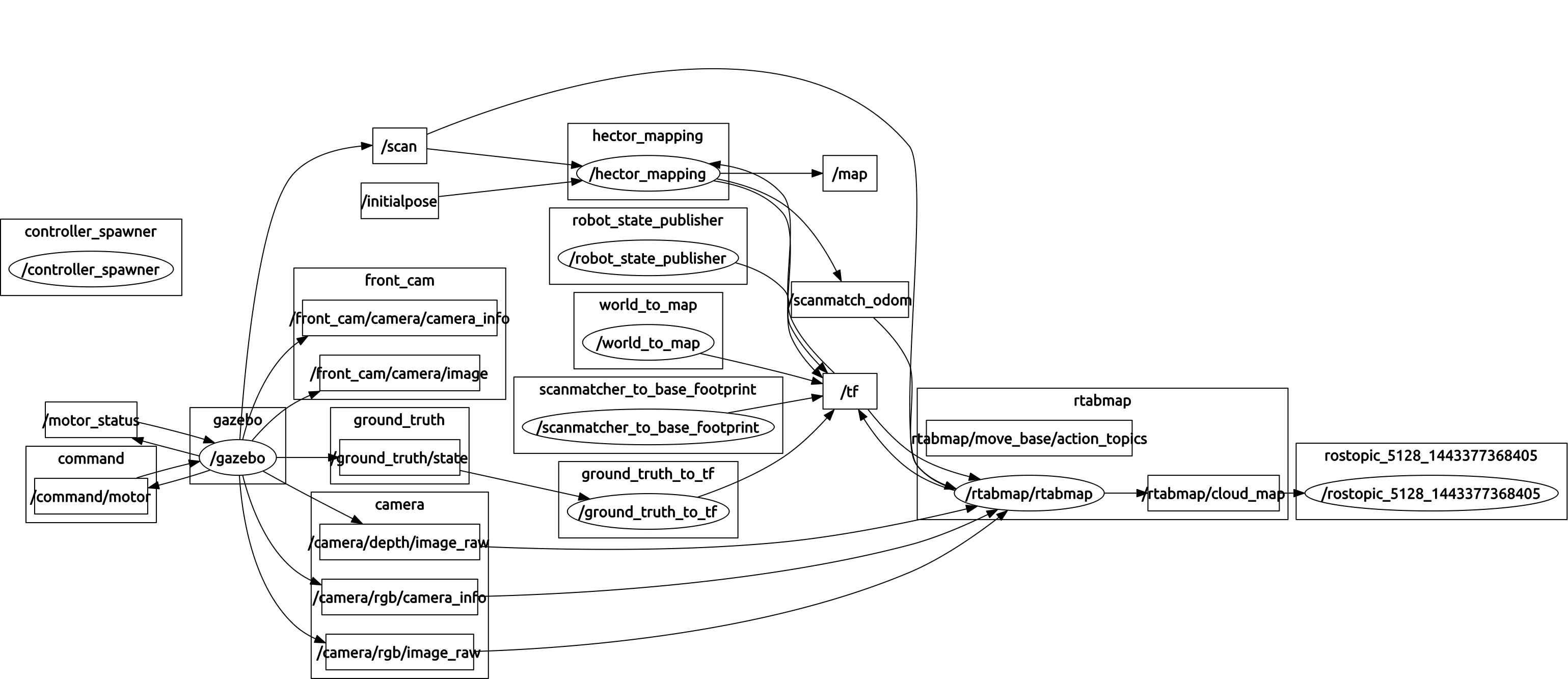
Now, the rtabmap subscribes to /scan topic but no message is received in /rtabmap/cloud_map topic.
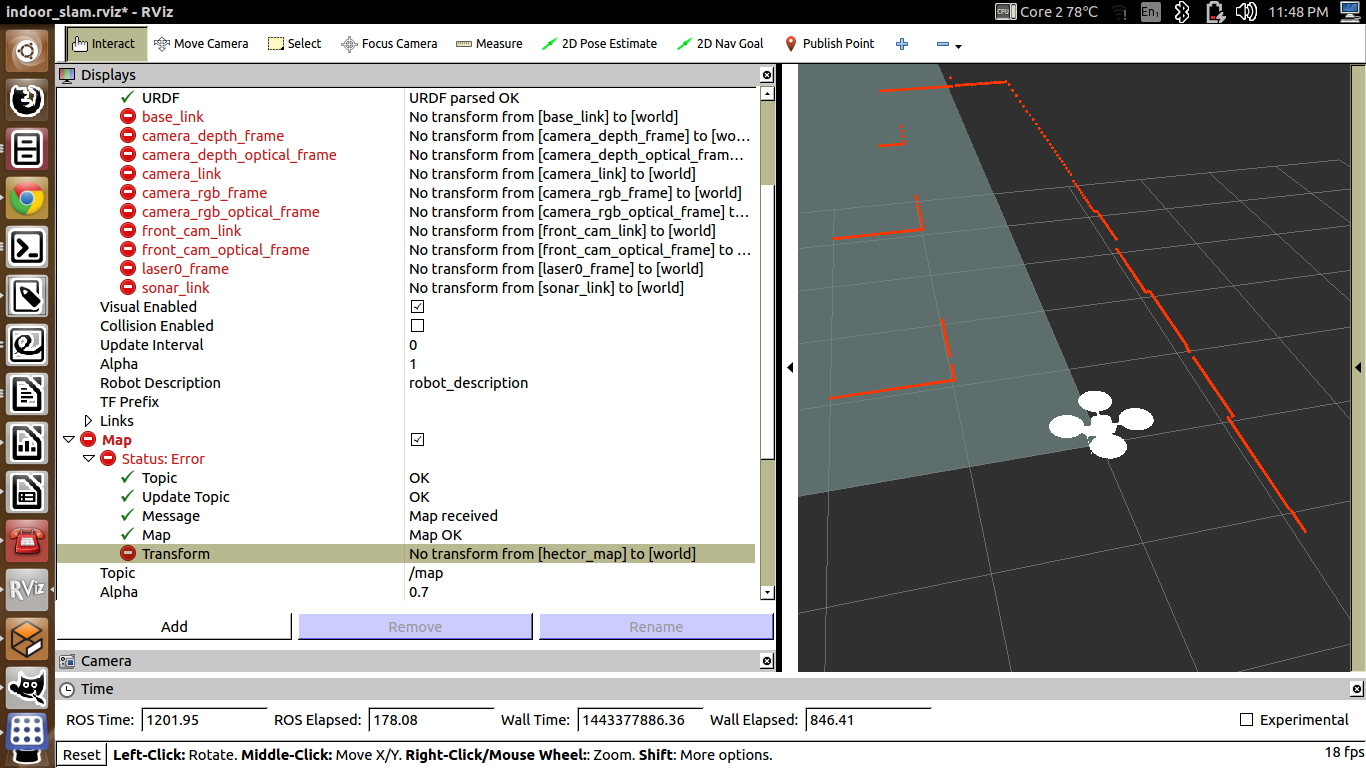
rtabmap is not publishing /map -> /hector_map transform and I get the warning,
Parameter name changed: LccBow/MaxDepth -> LccReextract/MaxDepth. Please update your launch file accordingly.
Since there is no transform between world and hector_map frame, I also get status error in rviz
I installed rtabmap_ros with apt-get,
$ sudo apt-get install ros-indigo-rtabmap-ros
would it be required to build the package manually to include latest changes?
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-with-octomap-and-hector-slam-tp696p714.html
I updated the launch file as follows,
<?xml version="1.0"?>
<launch>
<!-- Start Gazebo with wg world running in (max) realtime -->
<!-- We resume the logic in empty_world.launch, changing only the name of the world to be launched -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(find chefbot_gazebo)/worlds/complete_hotel.sdf"/>
</include>
<!-- Spawn simulated quadrotor uav -->
<include file="$(find hector_quadrotor_gazebo)/launch/spawn_quadrotor.launch" >
<arg name="model" value="$(find hector_quadrotor_description)/urdf/quadrotor_hokuyo_utm30lx_kinect.gazebo.xacro"/>
</include>
<node pkg="tf" type="static_transform_publisher" name="world_to_map"
args="0.0 0.0 0.0 0.0 0.0 0.0 /world /map 100" />
<node pkg="tf" type="static_transform_publisher" name="scanmatcher_to_base_footprint"
args="0.0 0.0 0.0 0.0 0.0 0.0 /scanmatcher_frame /base_footprint 100" />
<!-- Odometry from laser scans -->
<!-- We use Hector mapping to generate odometry for us -->
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping">
<!-- Frame names -->
<param name="map_frame" value="hector_map" />
<param name="base_frame" value="base_footprint" />
<param name="odom_frame" value="odom" />
<!-- Tf use -->
<param name="pub_map_odom_transform" value="false"/>
<param name="pub_map_scanmatch_transform" value="true"/>
<param name="pub_odometry" value="true"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.050"/>
<param name="map_size" value="2048"/>
<param name="map_multi_res_levels" value="2" />
<!-- Map update parameters -->
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="scan_topic" value="/scan"/>
</node>
<group ns="rtabmap">
<!-- args: "delete_db_on_start" parameter deletes database on start -->
<node name="rtabmap" pkg="rtabmap_ros" type="rtabmap" output="screen" args="--delete_db_on_start">
<param name="frame_id" type="string" value="base_footprint"/>
<param name="subscribe_depth" type="bool" value="true"/>
<param name="subscribe_laserScan" type="bool" value="true"/>
<!-- Inputs -->
<remap from="odom" to="/scanmatch_odom"/>
<remap from="scan" to="/scan"/>
<remap from="rgb/image" to="/camera/rgb/image_raw"/>
<remap from="depth/image" to="/camera/depth/image_raw"/>
<remap from="rgb/camera_info" to="/camera/rgb/camera_info"/>
<!-- RTAB-Map's parameters -->
<param name="LccIcp/Type" type="string" value="2"/>
<param name="RGBD/OptimizeSlam2D" type="string" value="true"/>
<param name="RGBD/LocalLoopDetectionSpace" type="string" value="true"/>
<param name="LccIcp2/CorrespondenceRatio" type="string" value="0.25"/>
<param name="LccBow/MaxDepth" type="string" value="10.0"/>
<param name="LccBow/InlierDistance" type="string" value="0.1"/>
<param name="LccBow/MinInliers" type="string" value="10"/>
</node>
</group>
<!-- Start rviz visualization with preset config -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find hector_quadrotor_demo)/rviz_cfg/indoor_slam.rviz"/>
</launch>
The tf and rosgraph,
Now, the rtabmap subscribes to /scan topic but no message is received in /rtabmap/cloud_map topic.
rtabmap is not publishing /map -> /hector_map transform and I get the warning,
Parameter name changed: LccBow/MaxDepth -> LccReextract/MaxDepth. Please update your launch file accordingly.
Since there is no transform between world and hector_map frame, I also get status error in rviz
I installed rtabmap_ros with apt-get,
$ sudo apt-get install ros-indigo-rtabmap-ros
would it be required to build the package manually to include latest changes?
| Free forum by Nabble | Edit this page |