Kinect For Azure / L515 - ICP (lighting invariant mapping)
URL: http://official-rtab-map-forum.206.s1.nabble.com/Kinect-For-Azure-L515-ICP-lighting-invariant-mapping-tp7187.html
Hello,
EDIT: Config files for K4A and L515 and be downloaded on v0.20.8 release.
With the L515 and Kinect For Azure, I've seen some great scans but I didn't see any scans in pitch dark using LiDAR capability advantage of those cameras. Here is a config file for Kinect For Azure with ICP mode using this config file: config_k4a_icp_v3.ini. RTAB-Map should be built with libpointmatcher, GTSAM and Kinect For Azure driver. I don't have a L515 to test with, but from what I saw, I think similar parameters could be used. Updated with L515 example below! For quick reference, here are the RTAB-Map parameters that I have modified:
Icp/CorrespondenceRatio= 0.2 (default=0.1) Icp/PMOutlierRatio= 0.65 (default=0.95) Icp/Epsilon= 0.005 (default=0) Icp/PointToPlaneMinComplexity= 0 (default=0.02) Icp/VoxelSize= 0 (default=0.05) Odom/ScanKeyFrameThr= 0.7 (default=0.9) OdomF2M/ScanMaxSize= 15000 (default=2000) Optimizer/GravitySigma= 0.3 (default=0.0) RGBD/ProximityPathMaxNeighbors= 1 (default=0) Reg/Strategy= 1 (default=0)
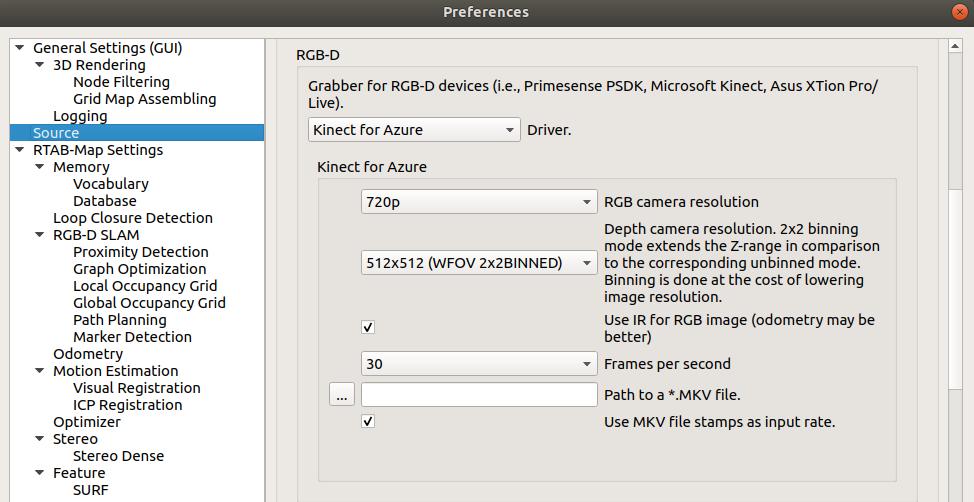
The Preferences->Source parameters. Note that I use IR mode for Kinect 4 Azure to use the raw LiDAR data (without distortion that could be added when registering to RGB camera and to have the whole LiDAR Field-Of-View) for best accuracy:
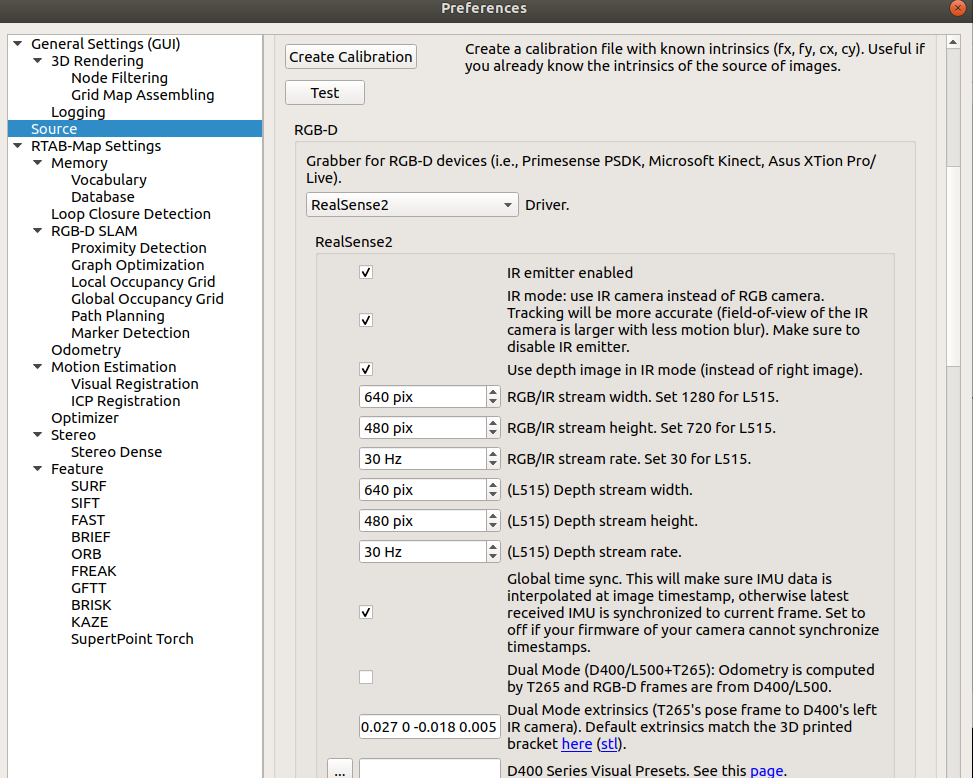
For RealSense L515 (this commit required):
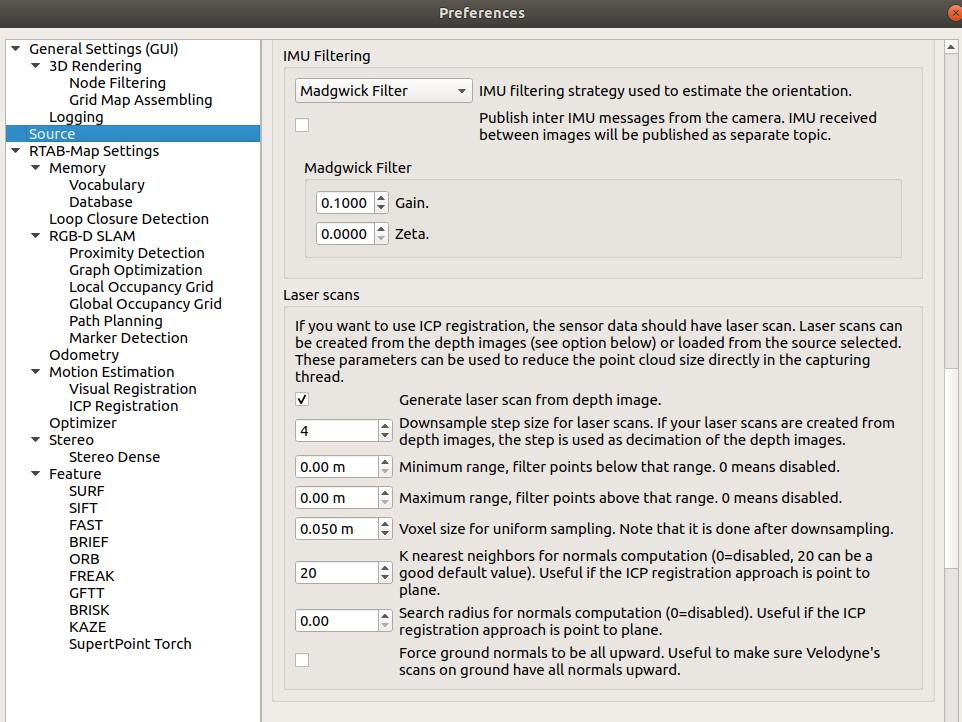
Here we generate a downsampled 3D laser scan from the depth image of Kinect to be able to use ICP:
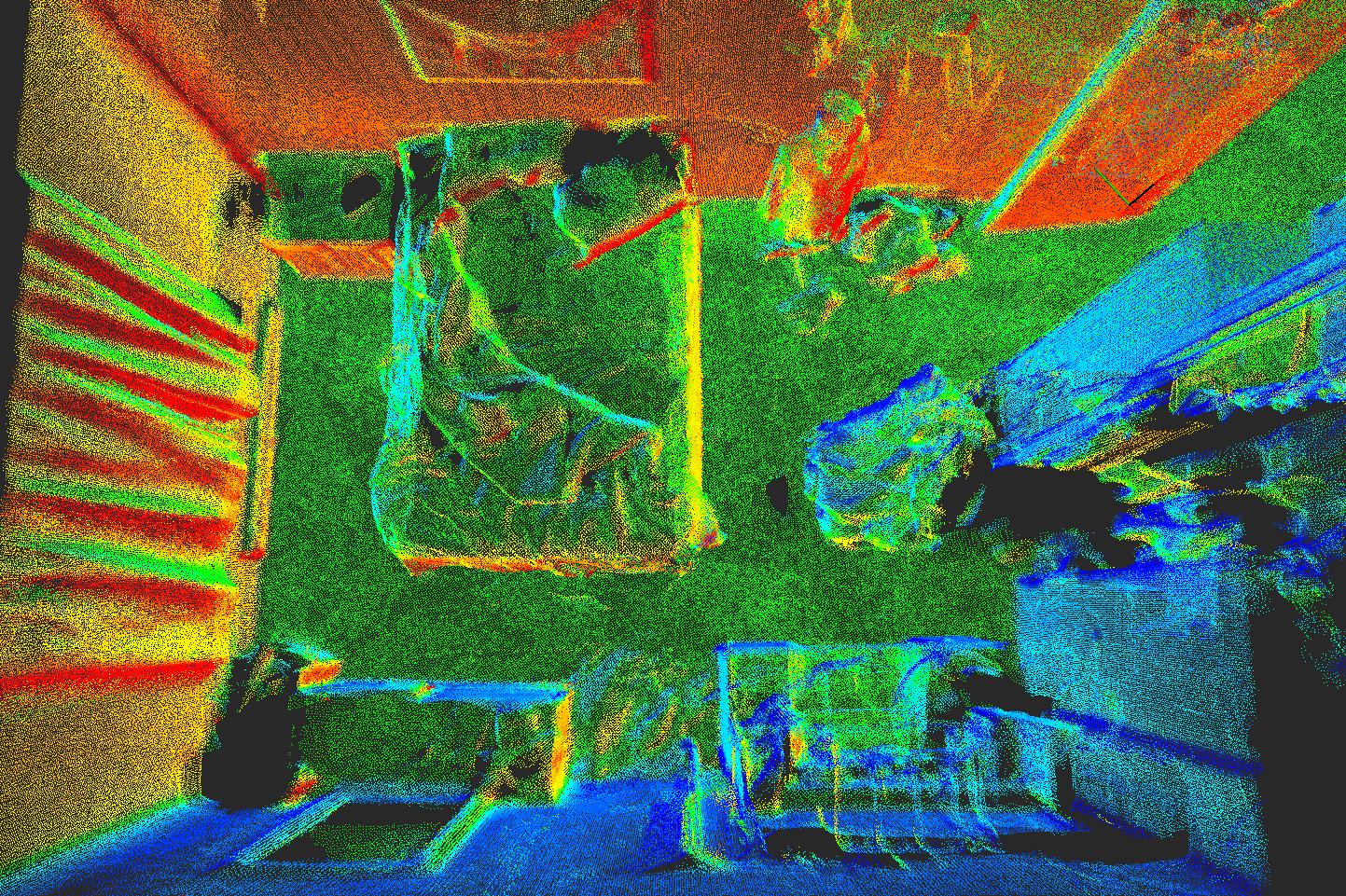
LiDAR intensity (voxel size=1cm):

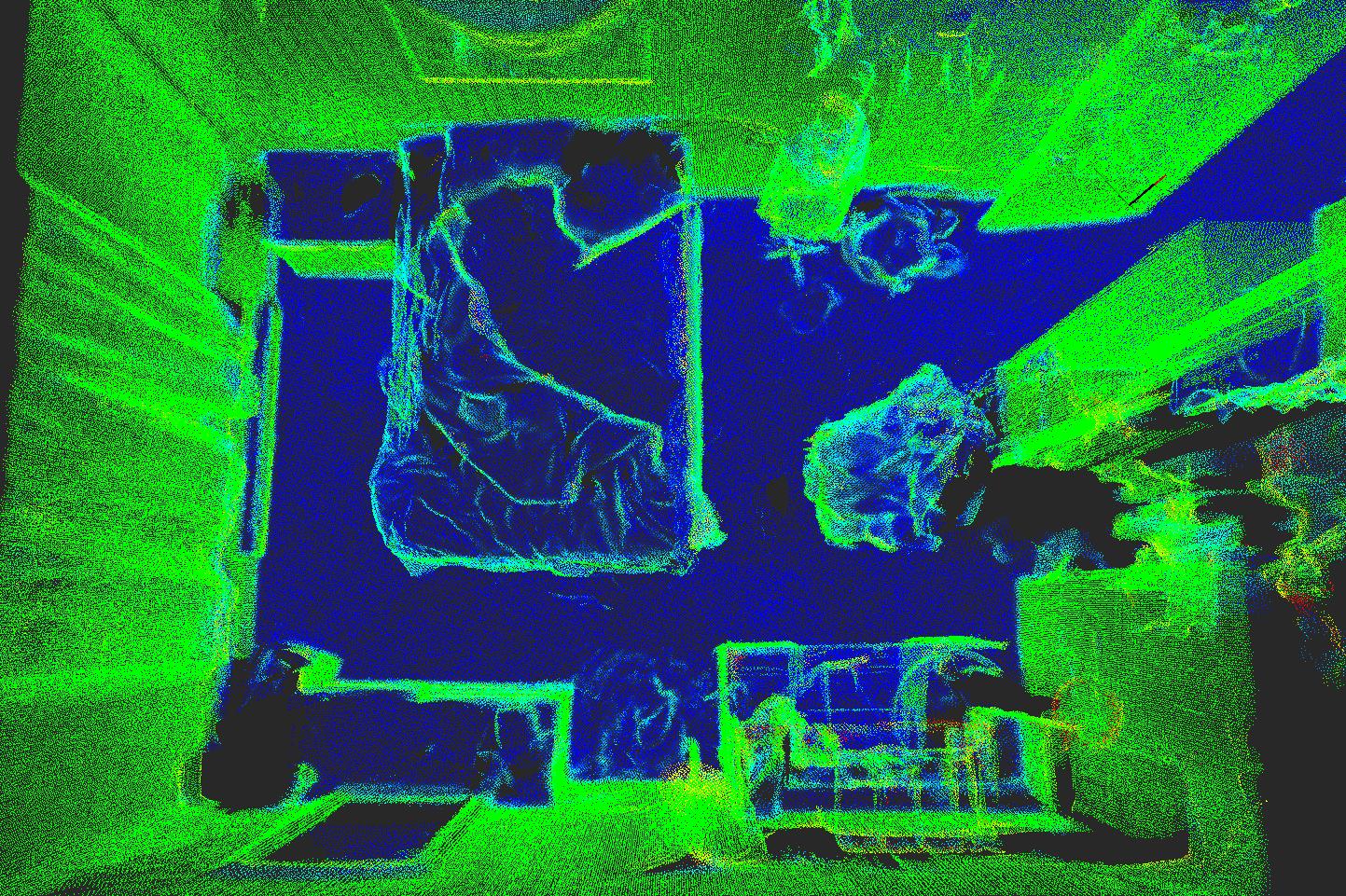
Normals colored along x-axis:
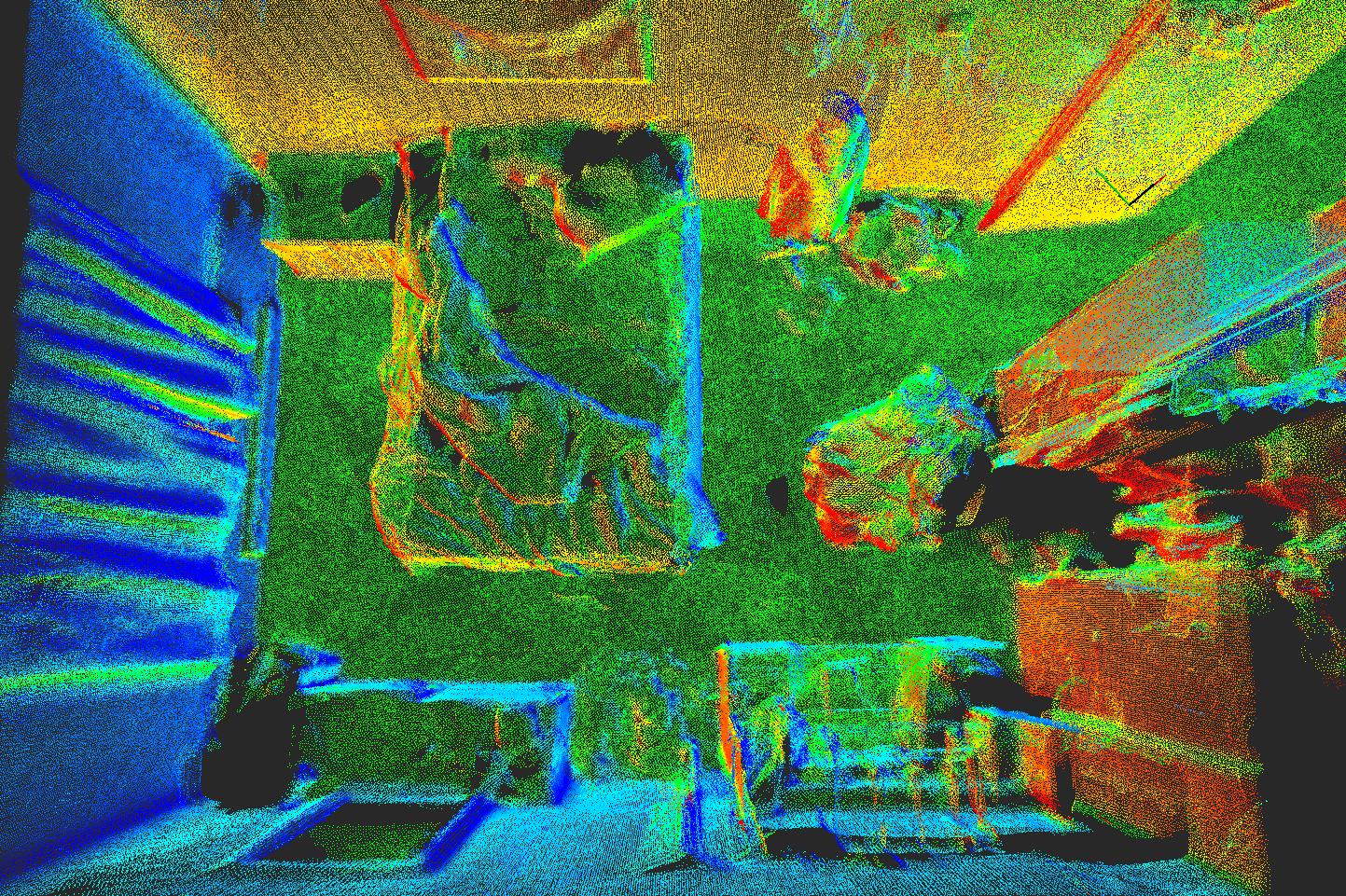
Normals colored along y-axis:
Normals colored along z-axis:
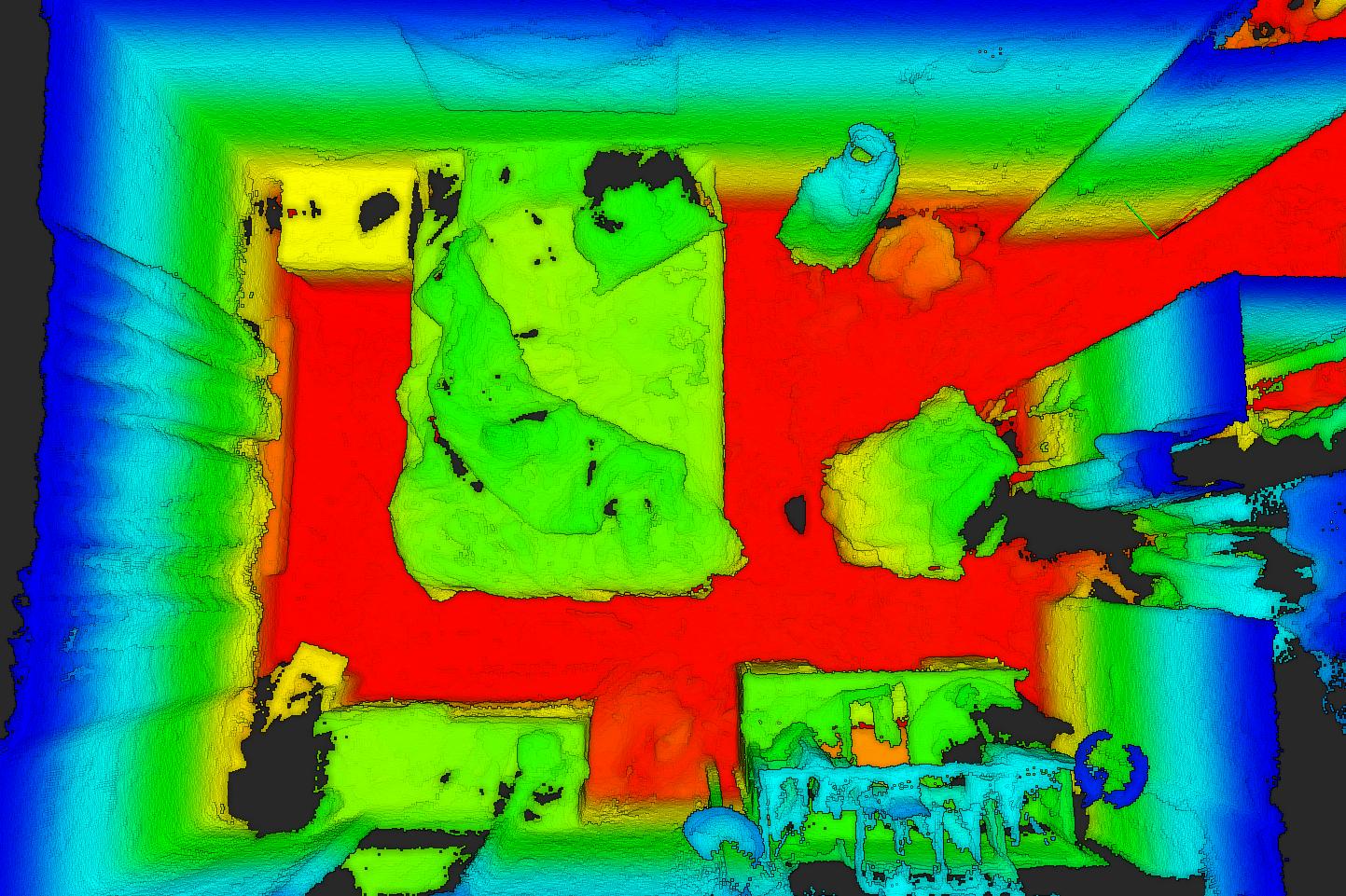
Colored height ramp (with EDL shader):
Regards,
Mathieu
| Free forum by Nabble | Edit this page |