Re: Problems with launch and mapping
Posted by denzle on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Problems-with-launch-and-mapping-tp6808p7203.html
Hi Mathieu,
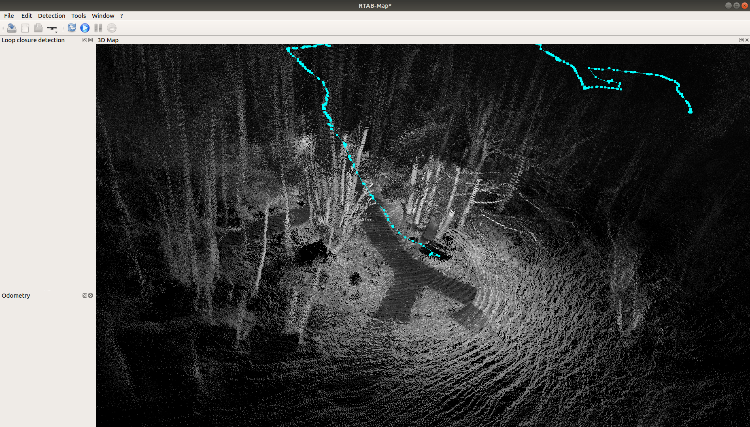
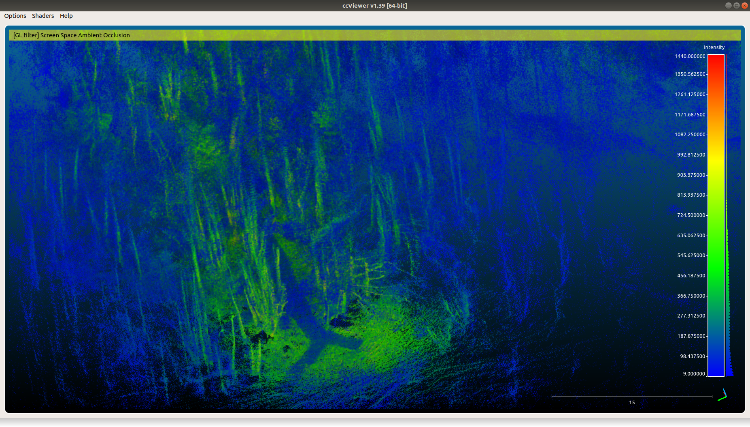
Heres and update to my lidar mapping. Using a new dataset and having a few day tinkering with settings i was able to produce this map on first pass offline processing with Rtab. Although i do get this error:
[pcl::VoxelGrid::applyFilter] Leaf size is too small for the input dataset. Integer indices would overflow.[pcl::VoxelGrid::applyFilter] Leaf size is too small for the input dataset. Integer indices would overflow.[ WARN] (2020-11-26 12:34:47.325) util3d.cpp:604::cloudFromDepthRGB() Cloud with only NaN values created!
[pcl::VoxelGrid::applyFilter] Leaf size is too small for the input dataset. Integer indices would overflow.[ WARN] (2020-11-26 12:34:48.427) util3d.cpp:604::cloudFromDepthRGB() Cloud with only NaN values created!
Would you have any idea which parameter i need to change or if theres anything that may increase accuracy even more prior to post-processing and using DB viewer?
One problem i've also noticed is how the odom jumps around a lot. Could this be due to the ouster/ros timing? Would setting to TIME_FROM_INTERNAL_OSC to TIME_FROM_PTP_1588 help when collecting data? I have played around with Hz inputs.
Other things i may need a little info on:
Decimation
voxel
Iterations
Downsampling
Is it better to run a DB file without voxelisation first considering it can be done when exporting to ply file?
I've added the newest and original db's, ply and rtab settings ini.
https://www.dropbox.com/sh/r872fydiaq83hgd/AABPwGjd9N-gwXxyC--HMSUva?dl=0
Also thanks for a great mapping software and all of your help so far.
Dan
URL: http://official-rtab-map-forum.206.s1.nabble.com/Problems-with-launch-and-mapping-tp6808p7203.html
Hi Mathieu,
Heres and update to my lidar mapping. Using a new dataset and having a few day tinkering with settings i was able to produce this map on first pass offline processing with Rtab. Although i do get this error:
[pcl::VoxelGrid::applyFilter] Leaf size is too small for the input dataset. Integer indices would overflow.[pcl::VoxelGrid::applyFilter] Leaf size is too small for the input dataset. Integer indices would overflow.[ WARN] (2020-11-26 12:34:47.325) util3d.cpp:604::cloudFromDepthRGB() Cloud with only NaN values created!
[pcl::VoxelGrid::applyFilter] Leaf size is too small for the input dataset. Integer indices would overflow.[ WARN] (2020-11-26 12:34:48.427) util3d.cpp:604::cloudFromDepthRGB() Cloud with only NaN values created!
Would you have any idea which parameter i need to change or if theres anything that may increase accuracy even more prior to post-processing and using DB viewer?
One problem i've also noticed is how the odom jumps around a lot. Could this be due to the ouster/ros timing? Would setting to TIME_FROM_INTERNAL_OSC to TIME_FROM_PTP_1588 help when collecting data? I have played around with Hz inputs.
Other things i may need a little info on:
Decimation
voxel
Iterations
Downsampling
Is it better to run a DB file without voxelisation first considering it can be done when exporting to ply file?
I've added the newest and original db's, ply and rtab settings ini.
https://www.dropbox.com/sh/r872fydiaq83hgd/AABPwGjd9N-gwXxyC--HMSUva?dl=0
Also thanks for a great mapping software and all of your help so far.
Dan
| Free forum by Nabble | Edit this page |