Re: Cannot display on custom sensor: Warning: Odometry could not get transform, Error in process()
Posted by TamirEll on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Cannot-display-on-custom-sensor-Warning-Odometry-could-not-get-transform-Error-in-process-tp7204p7258.html
Hi Mathieu,
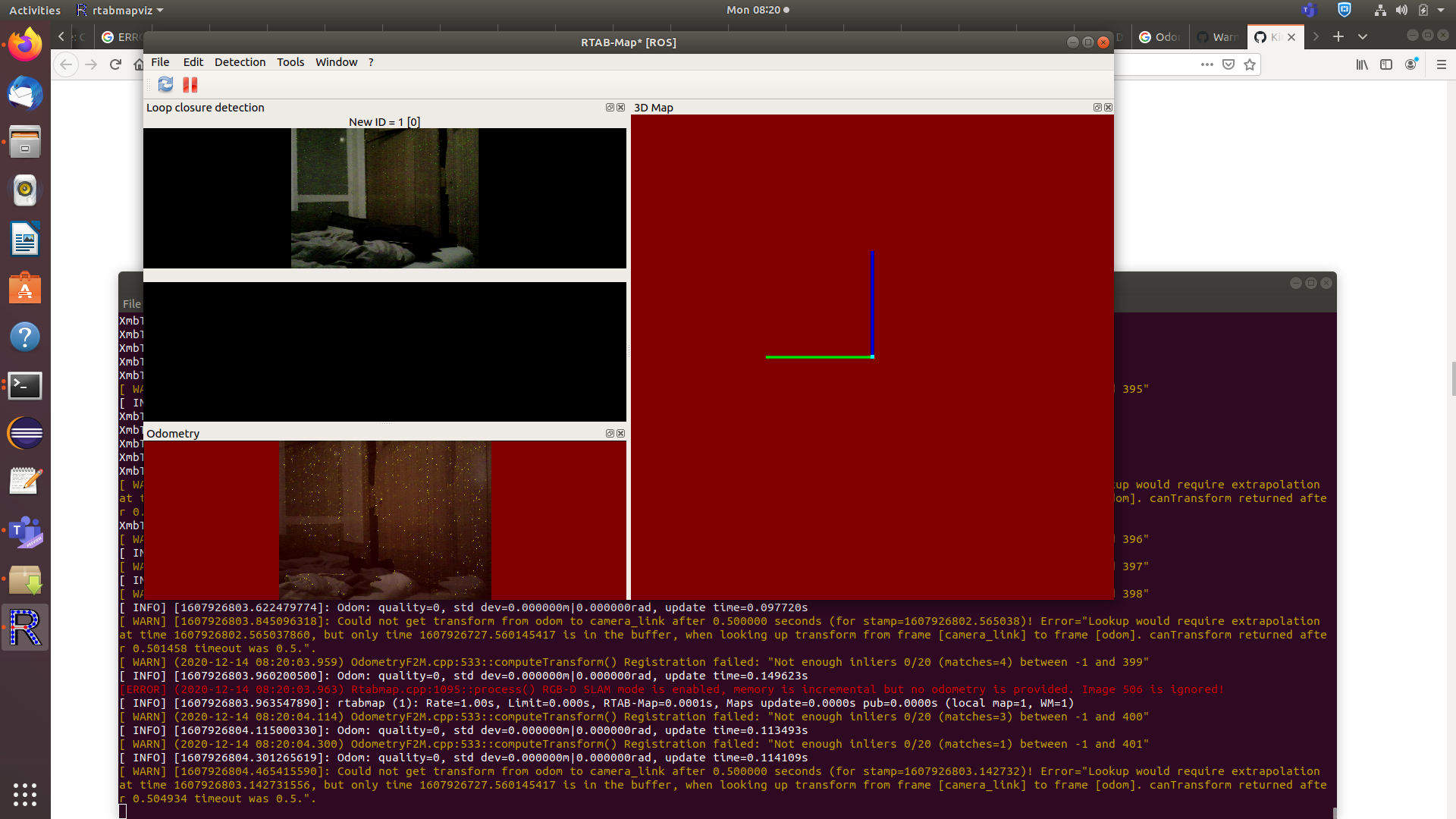
Thanks for the clarification! we are back on getting the image, and I can even see two new windows opening.
However, the tracking still doesn't start. Looking at the log, it looks like a registration problem..
Perhaps I am still setting something wrong in camera info?
Maybe the timestamp gap between the depth and RGB images is too big?
I recorded a new set, you can download here.
The log shows mostly these 3 warn/error:
[ WARN] [1607927085.493817396]: Could not get transform from odom to camera_link after 0.800000 seconds (for stamp=1607927083.957527)! Error="Lookup would require extrapolation at time 1607927083.957527213, but only time 1607927052.294570491 is in the buffer, when looking up transform from frame [camera_link] to frame [odom]. canTransform returned after 0.802296 timeout was 0.8.".
[ WARN] (2020-12-14 08:24:45.511) OdometryF2M.cpp:533::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=10) between -1 and 158"
[ INFO] [1607927085.512414793]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.125817s
[ERROR] (2020-12-14 08:24:45.520) Rtabmap.cpp:1095::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 190 is ignored!
regards,
Tamir.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Cannot-display-on-custom-sensor-Warning-Odometry-could-not-get-transform-Error-in-process-tp7204p7258.html
Hi Mathieu,
Thanks for the clarification! we are back on getting the image, and I can even see two new windows opening.
However, the tracking still doesn't start. Looking at the log, it looks like a registration problem..
Perhaps I am still setting something wrong in camera info?
Maybe the timestamp gap between the depth and RGB images is too big?
I recorded a new set, you can download here.
The log shows mostly these 3 warn/error:
[ WARN] [1607927085.493817396]: Could not get transform from odom to camera_link after 0.800000 seconds (for stamp=1607927083.957527)! Error="Lookup would require extrapolation at time 1607927083.957527213, but only time 1607927052.294570491 is in the buffer, when looking up transform from frame [camera_link] to frame [odom]. canTransform returned after 0.802296 timeout was 0.8.".
[ WARN] (2020-12-14 08:24:45.511) OdometryF2M.cpp:533::computeTransform() Registration failed: "Not enough inliers 0/20 (matches=10) between -1 and 158"
[ INFO] [1607927085.512414793]: Odom: quality=0, std dev=0.000000m|0.000000rad, update time=0.125817s
[ERROR] (2020-12-14 08:24:45.520) Rtabmap.cpp:1095::process() RGB-D SLAM mode is enabled, memory is incremental but no odometry is provided. Image 190 is ignored!
regards,
Tamir.
| Free forum by Nabble | Edit this page |