need some help in getting path planning to work with rtabmap
Posted by TOM_RB on
URL: http://official-rtab-map-forum.206.s1.nabble.com/need-some-help-in-getting-path-planning-to-work-with-rtabmap-tp7276.html
Hello,
- My plan is - as I have discussed in previous posts in this forum - is to do path planning and navigation of a real robot.
- My two wheeled robot uses 3 D435i cameras and one T265 camera for odometry
- Being new to ros , I have barely tuned most parameters in the navigation params files , relying instead on default settings from online tutorials etc.
* Recap of my steps:
1) I mapped my office, created a database, and launched Rtabmapviz in localization mode. The localization seems to be working.
My launch file is included here for reference :
my_robot_slam.launch
2) I saved the map created in the form : .yaml
3) I created a launch file for navigation :
my launch file link : my_robot_navigation.launch
As the launch file indicates, I'm launching move_base customized with the following parameters:
costmap_common_params.yaml
local_costmap_params.yaml
global_costmap_params.yaml
base_local_planner_params.yaml
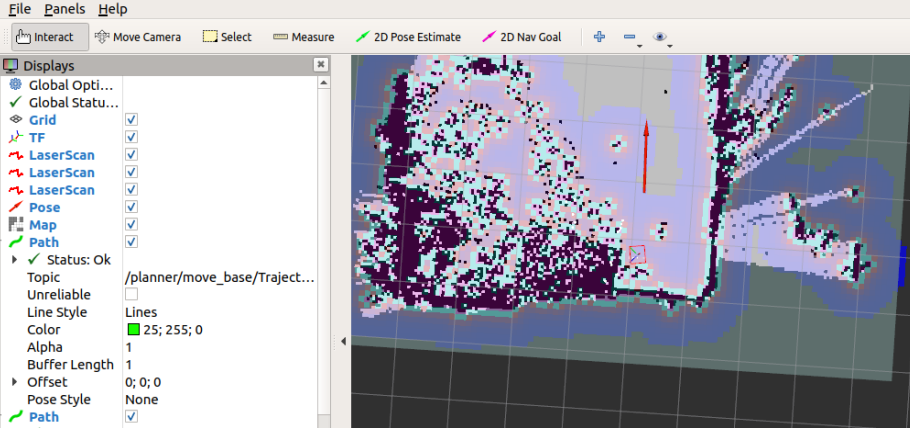
4) Now that move base is running, and Rtabmapviz is running in localization, I find that when using "2D nav goal" tool in rviz , there is no path file created from the current position to the new goal even though i am visualizing the following topics in rviz :
/planner/move_base/TrajectoryPlannerROS/global_plan
/planner/move_base/TrajectoryPlannerROS/local_plan
Can anyone help in resolving this issue? What am I doing wrong and why is move_base still unable to resolve a path plan? This was supposed to be straight forward but I am still struggling with getting move_base to work with rtabmap for two weeks now.
my rqt graph : rosgraph.svg
URL: http://official-rtab-map-forum.206.s1.nabble.com/need-some-help-in-getting-path-planning-to-work-with-rtabmap-tp7276.html
Hello,
- My plan is - as I have discussed in previous posts in this forum - is to do path planning and navigation of a real robot.
- My two wheeled robot uses 3 D435i cameras and one T265 camera for odometry
- Being new to ros , I have barely tuned most parameters in the navigation params files , relying instead on default settings from online tutorials etc.
* Recap of my steps:
1) I mapped my office, created a database, and launched Rtabmapviz in localization mode. The localization seems to be working.
My launch file is included here for reference :
my_robot_slam.launch
2) I saved the map created in the form : .yaml
3) I created a launch file for navigation :
my launch file link : my_robot_navigation.launch
As the launch file indicates, I'm launching move_base customized with the following parameters:
costmap_common_params.yaml
local_costmap_params.yaml
global_costmap_params.yaml
base_local_planner_params.yaml
4) Now that move base is running, and Rtabmapviz is running in localization, I find that when using "2D nav goal" tool in rviz , there is no path file created from the current position to the new goal even though i am visualizing the following topics in rviz :
/planner/move_base/TrajectoryPlannerROS/global_plan
/planner/move_base/TrajectoryPlannerROS/local_plan
Can anyone help in resolving this issue? What am I doing wrong and why is move_base still unable to resolve a path plan? This was supposed to be straight forward but I am still struggling with getting move_base to work with rtabmap for two weeks now.
my rqt graph : rosgraph.svg
TOM SMITH
| Free forum by Nabble | Edit this page |