Best param setup for 2d occupancy grid
Posted by seanxu112 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Best-param-setup-for-2d-occupancy-grid-tp7285.html
Hello Mathieu,
I am currently suffering from loop closure induced 2d occupancy grid overwrite.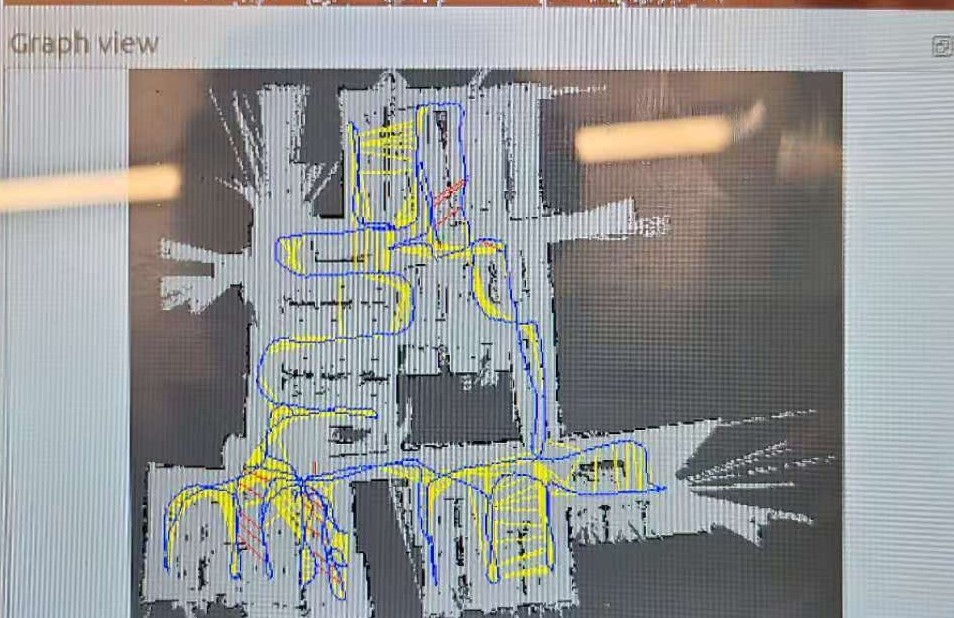
What is the best way to fix it?
Also, when I encounter glasses, my lidar gives noisy measurements, sometimes it detects the glass, sometimes it does not, sometimes it would return distance a bit further than where the glass is. I am using the basic libpointmatcher configuration with Trimmed Distance Outlier filter with 75%. Is there anything else I can do to optimize my 2D map?
Sincerely,
Sean
URL: http://official-rtab-map-forum.206.s1.nabble.com/Best-param-setup-for-2d-occupancy-grid-tp7285.html
Hello Mathieu,
I am currently suffering from loop closure induced 2d occupancy grid overwrite.
What is the best way to fix it?
Also, when I encounter glasses, my lidar gives noisy measurements, sometimes it detects the glass, sometimes it does not, sometimes it would return distance a bit further than where the glass is. I am using the basic libpointmatcher configuration with Trimmed Distance Outlier filter with 75%. Is there anything else I can do to optimize my 2D map?
Sincerely,
Sean
| Free forum by Nabble | Edit this page |