What parameters should I use to run the ros demo "3.1 Robot mapping"? LiDAR ICP doesn't seem to work as good as I expect
Posted by wilsonthongwk on
URL: http://official-rtab-map-forum.206.s1.nabble.com/What-parameters-should-I-use-to-run-the-ros-demo-3-1-Robot-mapping-LiDAR-ICP-doesn-t-seem-to-work-ast-tp7331.html
Dear matlabbe,
Greeting! and I am new to this forum.
I have a setup using realsense D435i with Turtlebot3. I am try to do 3D mapping with D435 camera + LiDAR in my office corridor. The turtlebot3 is going a straight line path for about 10 meters, turn 180degree, come back to where it was.
I am expecting the LiDAR-based ICP can help "sticking" the forward-view and backward-view nicely, but it doesn't seem to work.
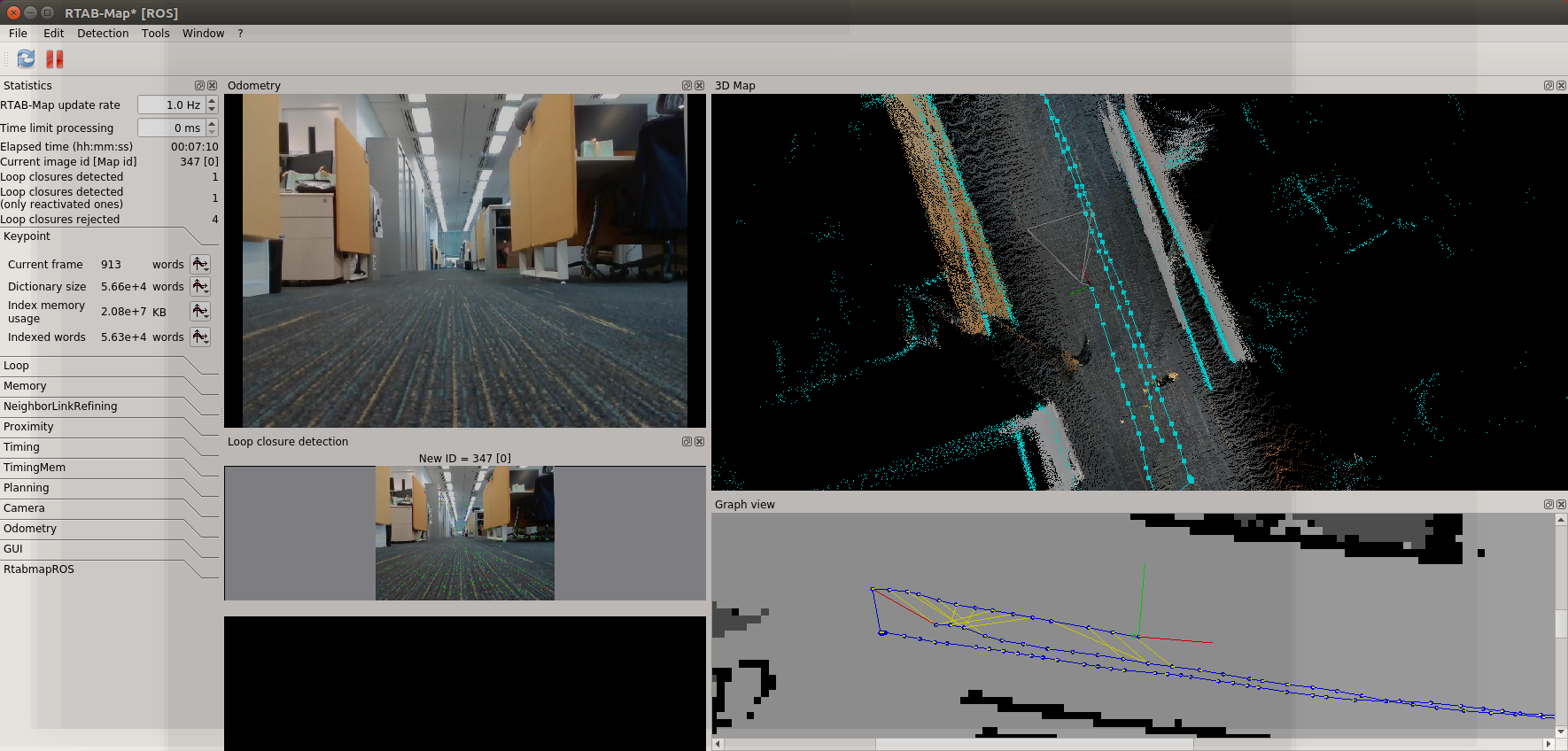
The following screenshot shows these problems
1) the same office partition is not aligned together between the "forward-view" and "backward-view",
2) rtabmap does not add "ICP edge" to the graph between the forward-view-nodes and back-view-nodes
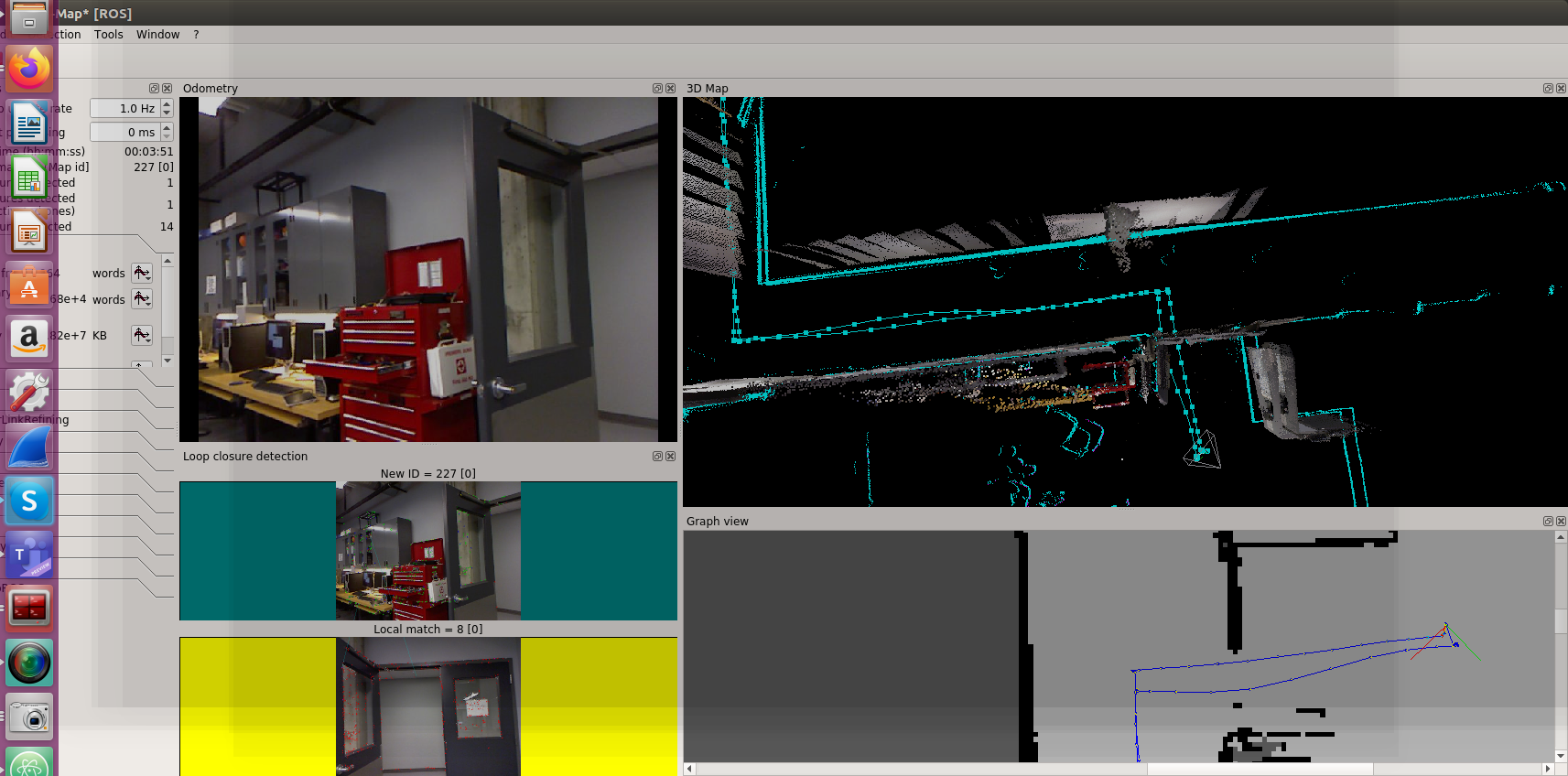
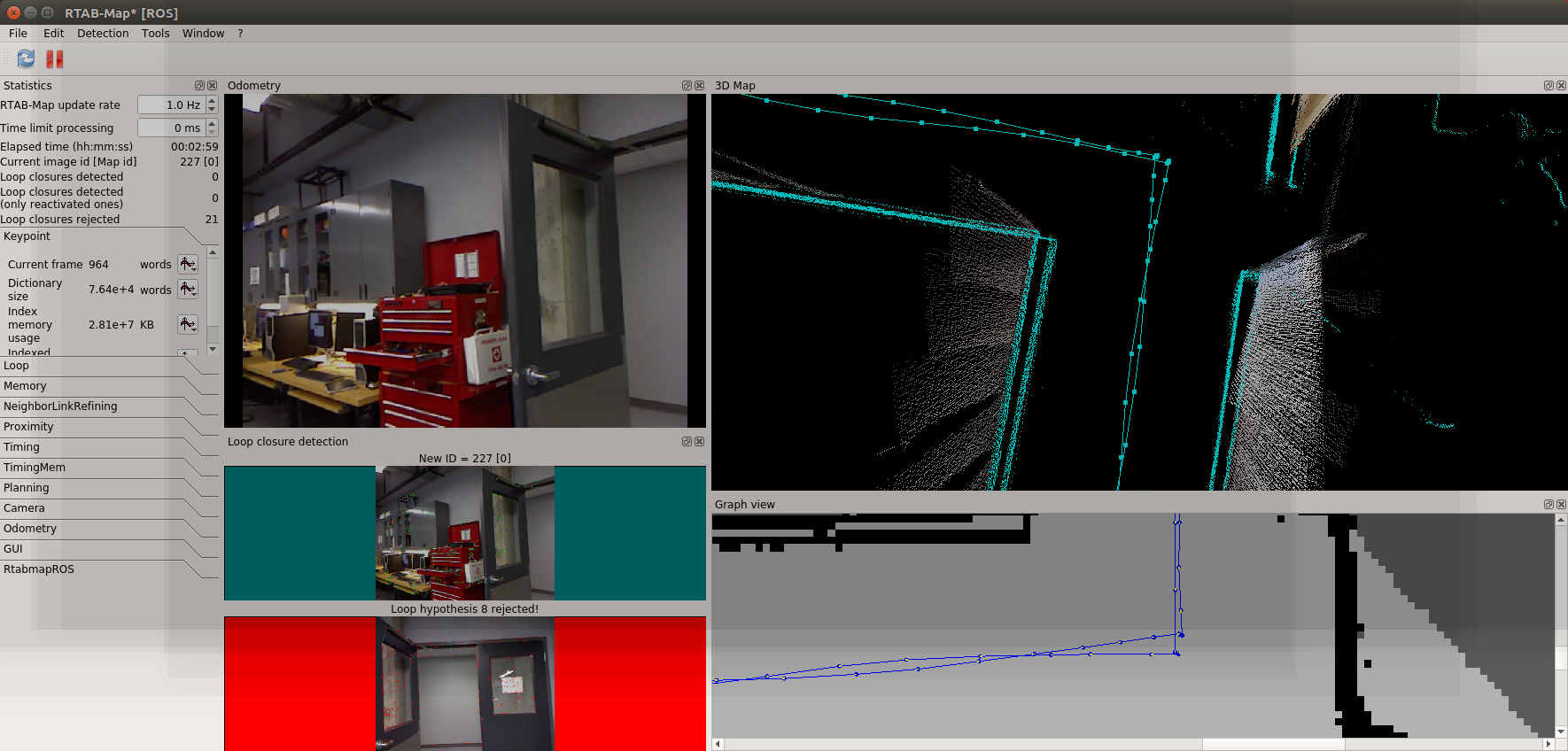
Because of seeing these problem, I go back to run again the robot mapping demo in http://wiki.ros.org/rtabmap_ros#Robot_mapping.
But still I can't get a good results. See some screenshots below.
What's wrong did I do? am I using some incorrect parameters?
I am using the config parameters in the following file to produce the turtlebot3 results and demo results. The max depth is set to 2.0M for mapping, as depth from D435 is too noisy!
config-rtabmap-demo.ini
I also tried clicking the "restore defaults" button to the default parameters but the forward-view and backward-view still cannot be aligned properly. These default parameters are in the following config file.
config-default.ini
Very much appreciated if you would give me some tips for me to test and improve the LiDAR-ICP results.
Thanks a lot!
Wilson
URL: http://official-rtab-map-forum.206.s1.nabble.com/What-parameters-should-I-use-to-run-the-ros-demo-3-1-Robot-mapping-LiDAR-ICP-doesn-t-seem-to-work-ast-tp7331.html
Dear matlabbe,
Greeting! and I am new to this forum.
I have a setup using realsense D435i with Turtlebot3. I am try to do 3D mapping with D435 camera + LiDAR in my office corridor. The turtlebot3 is going a straight line path for about 10 meters, turn 180degree, come back to where it was.
I am expecting the LiDAR-based ICP can help "sticking" the forward-view and backward-view nicely, but it doesn't seem to work.
The following screenshot shows these problems
1) the same office partition is not aligned together between the "forward-view" and "backward-view",
2) rtabmap does not add "ICP edge" to the graph between the forward-view-nodes and back-view-nodes
Because of seeing these problem, I go back to run again the robot mapping demo in http://wiki.ros.org/rtabmap_ros#Robot_mapping.
But still I can't get a good results. See some screenshots below.
What's wrong did I do? am I using some incorrect parameters?
I am using the config parameters in the following file to produce the turtlebot3 results and demo results. The max depth is set to 2.0M for mapping, as depth from D435 is too noisy!
config-rtabmap-demo.ini
I also tried clicking the "restore defaults" button to the default parameters but the forward-view and backward-view still cannot be aligned properly. These default parameters are in the following config file.
config-default.ini
Very much appreciated if you would give me some tips for me to test and improve the LiDAR-ICP results.
Thanks a lot!
Wilson
| Free forum by Nabble | Edit this page |