3D mapping cloud map for localization and 2D grid map for global costmap
Posted by Princemjp on
URL: http://official-rtab-map-forum.206.s1.nabble.com/3D-mapping-cloud-map-for-localization-and-2D-grid-map-for-global-costmap-tp7363.html
Hi Matthieu,
i am trying to make my rtabmap with velodyne setup map an entire area and use the 2D grid map for the global costmap
however using default parameters i get a map like this
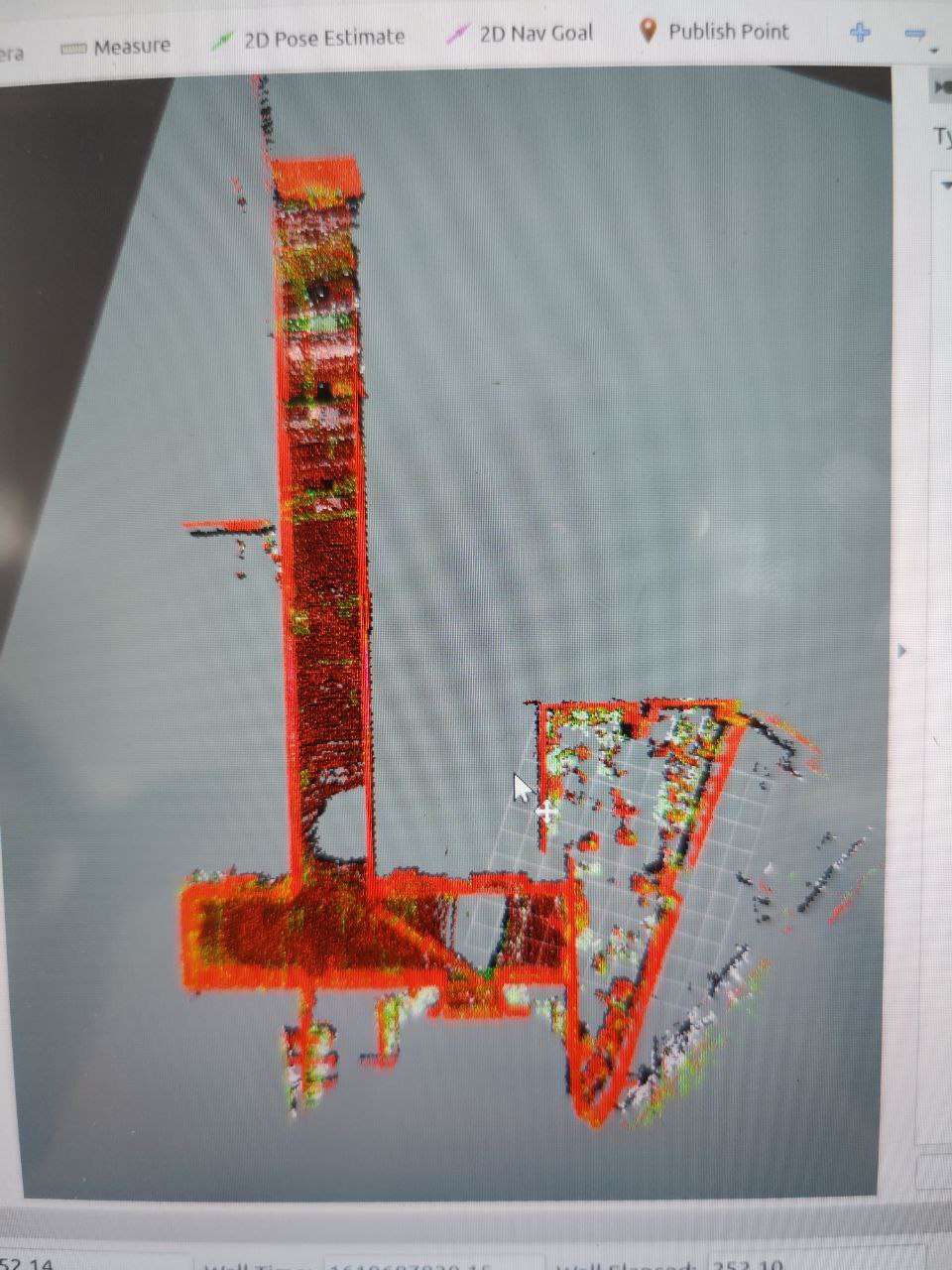
this is what i want my 3D cloud map to look like by localizing using all available points of reference such as the ceiling, however my 2D grid map is basically all black, which i need to edit the grid map manually for global costmap however i will be mapping large areas for my robot and i do not want to edit the map manually for such a large map
so i set my grid/MaxObstacleHeight to 0.5 meter and i get this
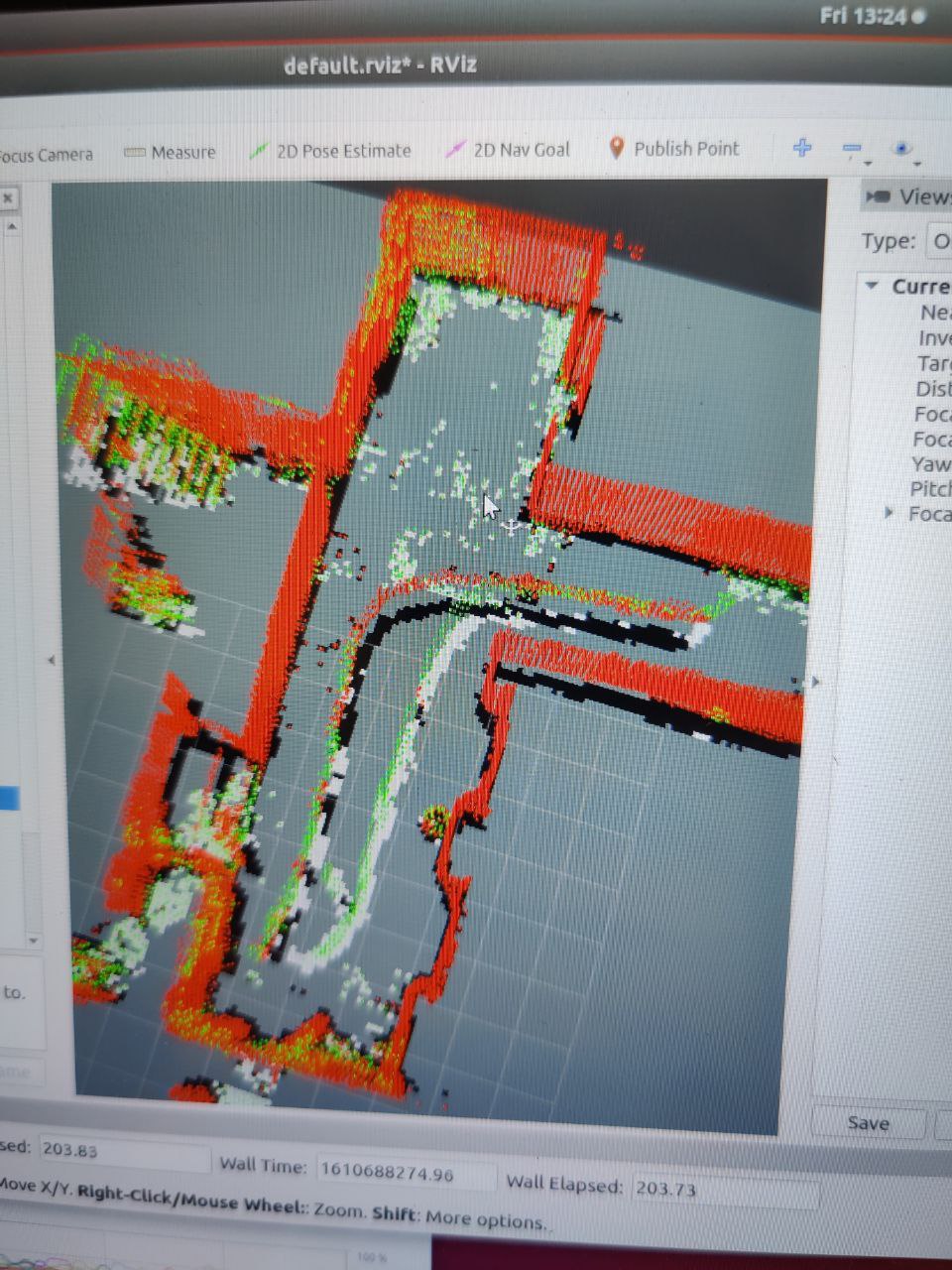
this is slightly better as my grid map doesnt look at the ceiling anymore but the grid map still sees dynamic obstacle such as myself when i am walking along with the robot while teleopping it, and also my 3D cloud map is missing the entire top part of the map
i set my grid/MaxGroundHeight to 0.0 meter as my sensor is 2 meters above the ground so now it will not see me as an obstacle and i got this
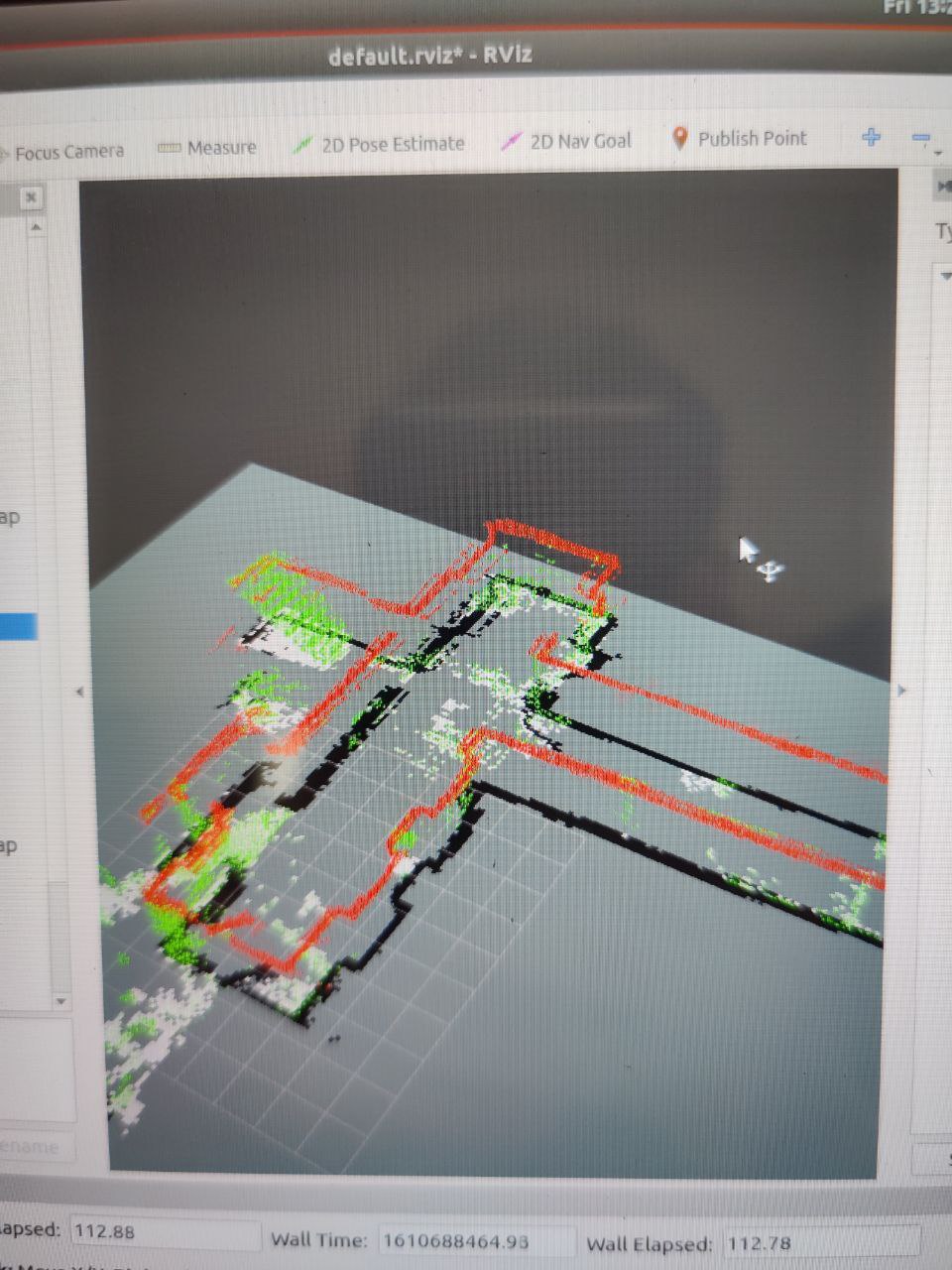
this is basically what i want my grid map to look like so that i can use this for my global costmap, however now my 3D cloud map is just a small line which i do not want as i want the most accurate localization as possible as my robot will be moving in a big area and if it has very little information it might lose localization easily.
so i saw another post where you set Grid/NormalsSegmentation to false and using this i got this
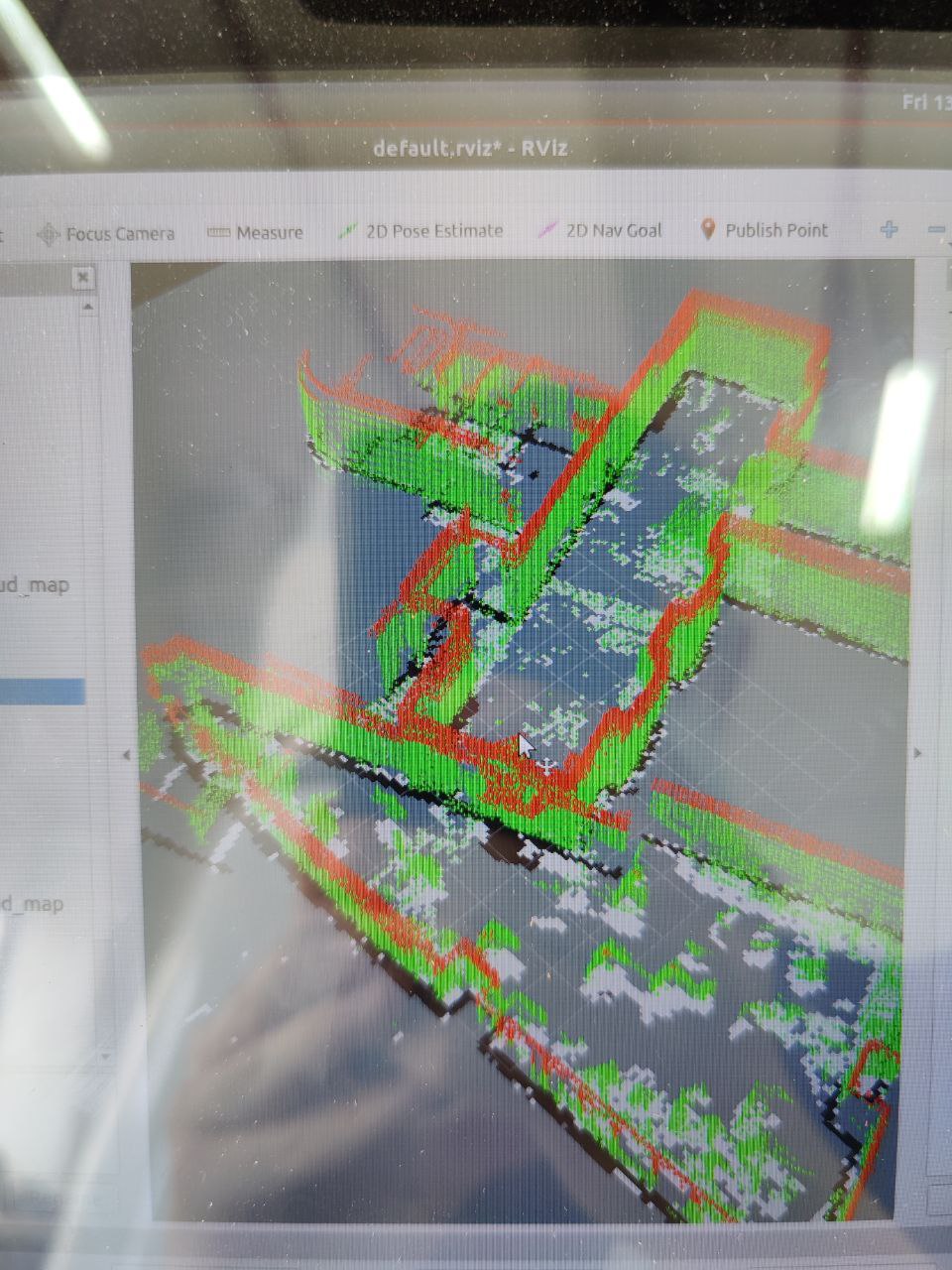
this is the best so far, with my 3D cloud map having a decent amount of data and my 2D grid map doesnt have that many black spots for me to edit out for global costmap. However i am still not getting the full data for my 3D cloud map as grid/MaxObstacleHeight limits the creation of the 3D cloud map in the vertical space. Do you have any way such that i could solve this issue? I was thinking of mainly creating the full 3D cloud map and then the 2D grid map only takes obstacles using MaxGroundHeight and MaxObstacleHeight as reference
URL: http://official-rtab-map-forum.206.s1.nabble.com/3D-mapping-cloud-map-for-localization-and-2D-grid-map-for-global-costmap-tp7363.html
Hi Matthieu,
i am trying to make my rtabmap with velodyne setup map an entire area and use the 2D grid map for the global costmap
however using default parameters i get a map like this
this is what i want my 3D cloud map to look like by localizing using all available points of reference such as the ceiling, however my 2D grid map is basically all black, which i need to edit the grid map manually for global costmap however i will be mapping large areas for my robot and i do not want to edit the map manually for such a large map
so i set my grid/MaxObstacleHeight to 0.5 meter and i get this
this is slightly better as my grid map doesnt look at the ceiling anymore but the grid map still sees dynamic obstacle such as myself when i am walking along with the robot while teleopping it, and also my 3D cloud map is missing the entire top part of the map
i set my grid/MaxGroundHeight to 0.0 meter as my sensor is 2 meters above the ground so now it will not see me as an obstacle and i got this
this is basically what i want my grid map to look like so that i can use this for my global costmap, however now my 3D cloud map is just a small line which i do not want as i want the most accurate localization as possible as my robot will be moving in a big area and if it has very little information it might lose localization easily.
so i saw another post where you set Grid/NormalsSegmentation to false and using this i got this
this is the best so far, with my 3D cloud map having a decent amount of data and my 2D grid map doesnt have that many black spots for me to edit out for global costmap. However i am still not getting the full data for my 3D cloud map as grid/MaxObstacleHeight limits the creation of the 3D cloud map in the vertical space. Do you have any way such that i could solve this issue? I was thinking of mainly creating the full 3D cloud map and then the 2D grid map only takes obstacles using MaxGroundHeight and MaxObstacleHeight as reference
| Free forum by Nabble | Edit this page |