Re: Visual odometry drift when rotating
Posted by Manuel on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Visual-odometry-drift-when-rotating-tp7441p7463.html
Hi,
It works!
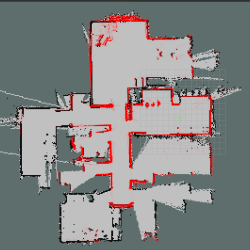
It is not drifting anymore when the robot turns.
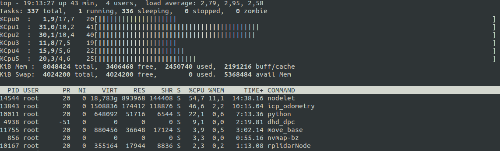
In addition, the use of CPU is now less than before.
I use a docker image with libpointmatcher: Dockerfile.
And I use the configuration that you recommended to me.
I have read the documentation of libpointmatcher but I am not sure how the rtabmap is matching the configuration from ros to the library configuration.
I have played configuring libpointmatcher directly, from the yaml file but I have not been abled to obtain the performance that the configuration you send to me.
Thanks for you help.
I will try to investigate a bit how rtabamp node is using the libpointmatcher library, in order to customize a bit futher.
regards,
Manuel Huertas.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Visual-odometry-drift-when-rotating-tp7441p7463.html
Hi,
It works!
It is not drifting anymore when the robot turns.
In addition, the use of CPU is now less than before.
I use a docker image with libpointmatcher: Dockerfile.
And I use the configuration that you recommended to me.
I have read the documentation of libpointmatcher but I am not sure how the rtabmap is matching the configuration from ros to the library configuration.
I have played configuring libpointmatcher directly, from the yaml file but I have not been abled to obtain the performance that the configuration you send to me.
Thanks for you help.
I will try to investigate a bit how rtabamp node is using the libpointmatcher library, in order to customize a bit futher.
regards,
Manuel Huertas.
| Free forum by Nabble | Edit this page |