Local costmap is empty
Posted by ryleymcc on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Local-costmap-is-empty-tp7464.html
I can see rtabmap publishing the cloud_obstacle topic in rviz.
I can't see move_base subscribing to cloud_obstacles in rqt_graph.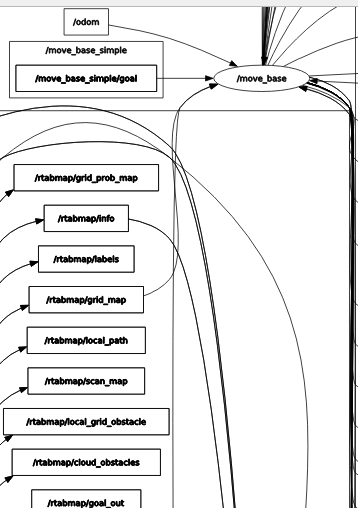
The local costmap is empty and TEB local planner does not avoid local obstacles.
My global costmap seems to be working fine and a global path is created without any problems.
I am using D435i and T265 real-sense cameras.
This is my costmap_common_params.yaml
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[-0.35, 0.6], [1.32 , 0.6], [1.32, -0.6], [-0.35, -0.6]]
#robot_radius: 1
inflation_layer:
inflation_radius: 10
transform_tolerance: 2
obstacle_layer:
obstacle_range: 3.5
raytrrace_range: 4
max_obstacle_height: -99999
min_obstacle_height: 99999
track_unknown_space: true
This is my local_costmap_params.yaml
local_costmap:
global_frame: t265_odom_frame
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.05
#transform_tolerance: 10
observation_sources: point_cloud_sensor
point_cloud_sensor: {sensor_frame: odom,
data_type: PointCloud2,
topic: /rtabmap/cloud_obstacles,
marking: true, clearing: false,
min_obstacle_height: -99999,
max_obstacle_height: 999999}
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
this is my working global_costmap_params.yaml
global_costmap:
global_frame: map
robot_base_frame: base_link
update_frequency: 1.0
static_map: true
observation_sources: point_cloud_sensor
point_cloud_sensor: {sensor_frame: odom, data_type: PointCloud2, topic: /rtabmap/cloud_obstacles, marking: true, clearing: false}
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
This is my launch file
<launch>
<include file="$(find realsense2_camera)/launch/rs_d400_and_t265.launch" />
<include file="$(find rtabmap_ros)/launch/rtabmap.launch" >
<arg name="odom_topic" value="/t265/odom/sample"/>
<arg name="frame_id" value="t265_link"/>
<arg name="rgbd_sync" value="true"/>
<arg name="depth_topic" value="/d400/aligned_depth_to_color/image_raw"/>
<arg name="rgb_topic" value="/d400/color/image_raw"/>
<arg name="camera_info_topic" value="/d400/color/camera_info"/>
<arg name="approx_rgbd_sync" value="false"/>
<arg name="visual_odometry" value="false"/>
<arg name="localization" value="false"/>
</include>
</launch>
When i go into localization mode cloud_obstacles is not published anymore so how could i avoid obstacles in localization mode?
URL: http://official-rtab-map-forum.206.s1.nabble.com/Local-costmap-is-empty-tp7464.html
I can see rtabmap publishing the cloud_obstacle topic in rviz.
I can't see move_base subscribing to cloud_obstacles in rqt_graph.
The local costmap is empty and TEB local planner does not avoid local obstacles.
My global costmap seems to be working fine and a global path is created without any problems.
I am using D435i and T265 real-sense cameras.
This is my costmap_common_params.yaml
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[-0.35, 0.6], [1.32 , 0.6], [1.32, -0.6], [-0.35, -0.6]]
#robot_radius: 1
inflation_layer:
inflation_radius: 10
transform_tolerance: 2
obstacle_layer:
obstacle_range: 3.5
raytrrace_range: 4
max_obstacle_height: -99999
min_obstacle_height: 99999
track_unknown_space: true
This is my local_costmap_params.yaml
local_costmap:
global_frame: t265_odom_frame
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.05
#transform_tolerance: 10
observation_sources: point_cloud_sensor
point_cloud_sensor: {sensor_frame: odom,
data_type: PointCloud2,
topic: /rtabmap/cloud_obstacles,
marking: true, clearing: false,
min_obstacle_height: -99999,
max_obstacle_height: 999999}
plugins:
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
this is my working global_costmap_params.yaml
global_costmap:
global_frame: map
robot_base_frame: base_link
update_frequency: 1.0
static_map: true
observation_sources: point_cloud_sensor
point_cloud_sensor: {sensor_frame: odom, data_type: PointCloud2, topic: /rtabmap/cloud_obstacles, marking: true, clearing: false}
plugins:
- {name: static_layer, type: "costmap_2d::StaticLayer"}
- {name: obstacle_layer, type: "costmap_2d::ObstacleLayer"}
- {name: inflation_layer, type: "costmap_2d::InflationLayer"}
This is my launch file
<launch>
<include file="$(find realsense2_camera)/launch/rs_d400_and_t265.launch" />
<include file="$(find rtabmap_ros)/launch/rtabmap.launch" >
<arg name="odom_topic" value="/t265/odom/sample"/>
<arg name="frame_id" value="t265_link"/>
<arg name="rgbd_sync" value="true"/>
<arg name="depth_topic" value="/d400/aligned_depth_to_color/image_raw"/>
<arg name="rgb_topic" value="/d400/color/image_raw"/>
<arg name="camera_info_topic" value="/d400/color/camera_info"/>
<arg name="approx_rgbd_sync" value="false"/>
<arg name="visual_odometry" value="false"/>
<arg name="localization" value="false"/>
</include>
</launch>
When i go into localization mode cloud_obstacles is not published anymore so how could i avoid obstacles in localization mode?
| Free forum by Nabble | Edit this page |