RTAB-Map loop closure issue
Posted by ammar.n.abbas on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-loop-closure-issue-tp7472.html
during mapping, while driving forward and reverse to capture similar point of view, the loop closure point detection is crossing each other.
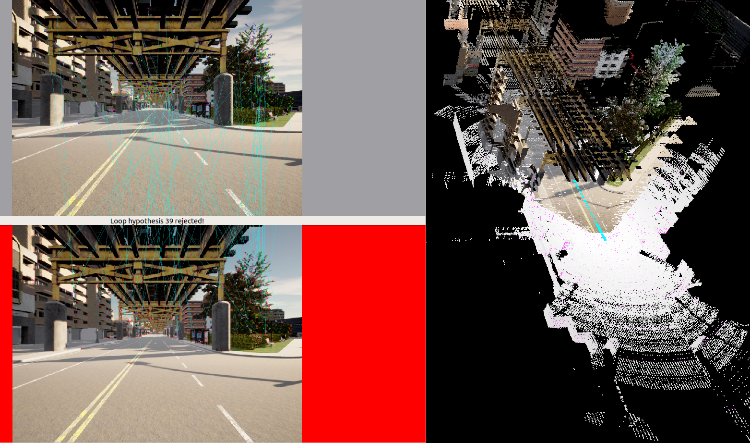
I have used an optical transform for all cameras
'''
<arg name="pi/2" value="1.5707963267948966" />
<node pkg="tf" type="static_transform_publisher" name="base_link" args="0 0 2 -$(arg pi/2) 0 -$(arg pi/2) ego_vehicle ego_vehicle/depth_front 0" />
'''
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-Map-loop-closure-issue-tp7472.html
during mapping, while driving forward and reverse to capture similar point of view, the loop closure point detection is crossing each other.
I have used an optical transform for all cameras
'''
<arg name="pi/2" value="1.5707963267948966" />
<node pkg="tf" type="static_transform_publisher" name="base_link" args="0 0 2 -$(arg pi/2) 0 -$(arg pi/2) ego_vehicle ego_vehicle/depth_front 0" />
'''
| Free forum by Nabble | Edit this page |