Re: Filtering rtabmap localization jumps with robot_localization in 2D
Posted by derektan1995 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Filtering-rtabmap-localization-jumps-with-robot-localization-in-2D-tp5931p7477.html
Hi Mathieu,
I am trying out the approach you have posted using robot_localization via ekf to get rid of jumping localization poses. After running the ekf node, i noticed that my base_link tf jitters very significantly, even though my map and odom tf remains relatively still.
Here is a video of the jittering effects: https://drive.google.com/file/d/16h-7SrQsWLnX6InZ1AA2P5VU39tu0lW-/view?usp=sharing
I dug further and I realized that the rtabmap_ros node is still publishing tf data even though the parameter 'publish_tf' is set to false. I noticed this using the command 'rostopic info /tf', and received the output:
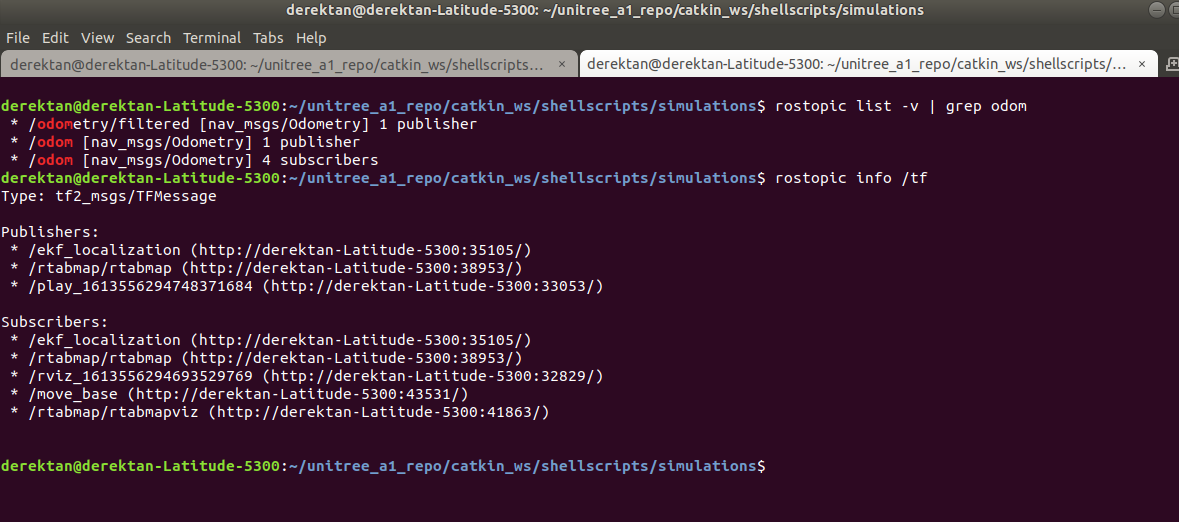
Any insights as tf is still being published even though 'publish_tf' is set to false? I suspect this could be the reason why the base_link is jittering so much.
p.s. I used your robot_localization ekf code as per what you have posted, without changing anything. Here is my launch file code ('localization' and 'smoothen_localization_using_ekf' parameters are set to true): https://drive.google.com/file/d/1DNw4DrwKxVhSeR2d58YsjvuwMXdCZxfl/view?usp=sharing
EDIT: It seems that if I set both odom0_differential and odom0_relative to false, the jitter effect is gone. However, there is no change the original localization jitters.
Much thanks,
Derek
URL: http://official-rtab-map-forum.206.s1.nabble.com/Filtering-rtabmap-localization-jumps-with-robot-localization-in-2D-tp5931p7477.html
Hi Mathieu,
I am trying out the approach you have posted using robot_localization via ekf to get rid of jumping localization poses. After running the ekf node, i noticed that my base_link tf jitters very significantly, even though my map and odom tf remains relatively still.
Here is a video of the jittering effects: https://drive.google.com/file/d/16h-7SrQsWLnX6InZ1AA2P5VU39tu0lW-/view?usp=sharing
I dug further and I realized that the rtabmap_ros node is still publishing tf data even though the parameter 'publish_tf' is set to false. I noticed this using the command 'rostopic info /tf', and received the output:
Any insights as tf is still being published even though 'publish_tf' is set to false? I suspect this could be the reason why the base_link is jittering so much.
p.s. I used your robot_localization ekf code as per what you have posted, without changing anything. Here is my launch file code ('localization' and 'smoothen_localization_using_ekf' parameters are set to true): https://drive.google.com/file/d/1DNw4DrwKxVhSeR2d58YsjvuwMXdCZxfl/view?usp=sharing
EDIT: It seems that if I set both odom0_differential and odom0_relative to false, the jitter effect is gone. However, there is no change the original localization jitters.
Much thanks,
Derek
| Free forum by Nabble | Edit this page |