Re: rtabmap localization error
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-localization-error-tp7501p7535.html
Hi,
In your case, the robot won't be able to localize alone with the camera even by teleoperating it on the same path than during mapping, as the environment is textureless.
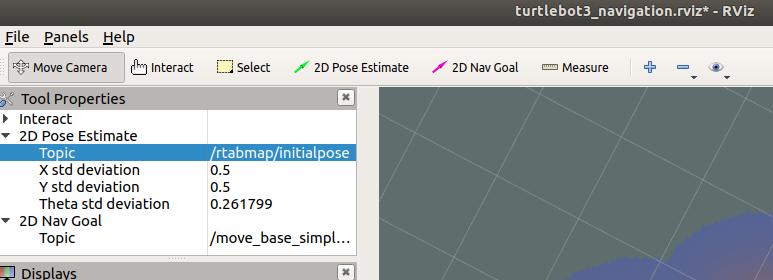
To set a localization guess manually, you can use "2D Pose Estimate" button with its topic set to /rtabmap/initialpose.
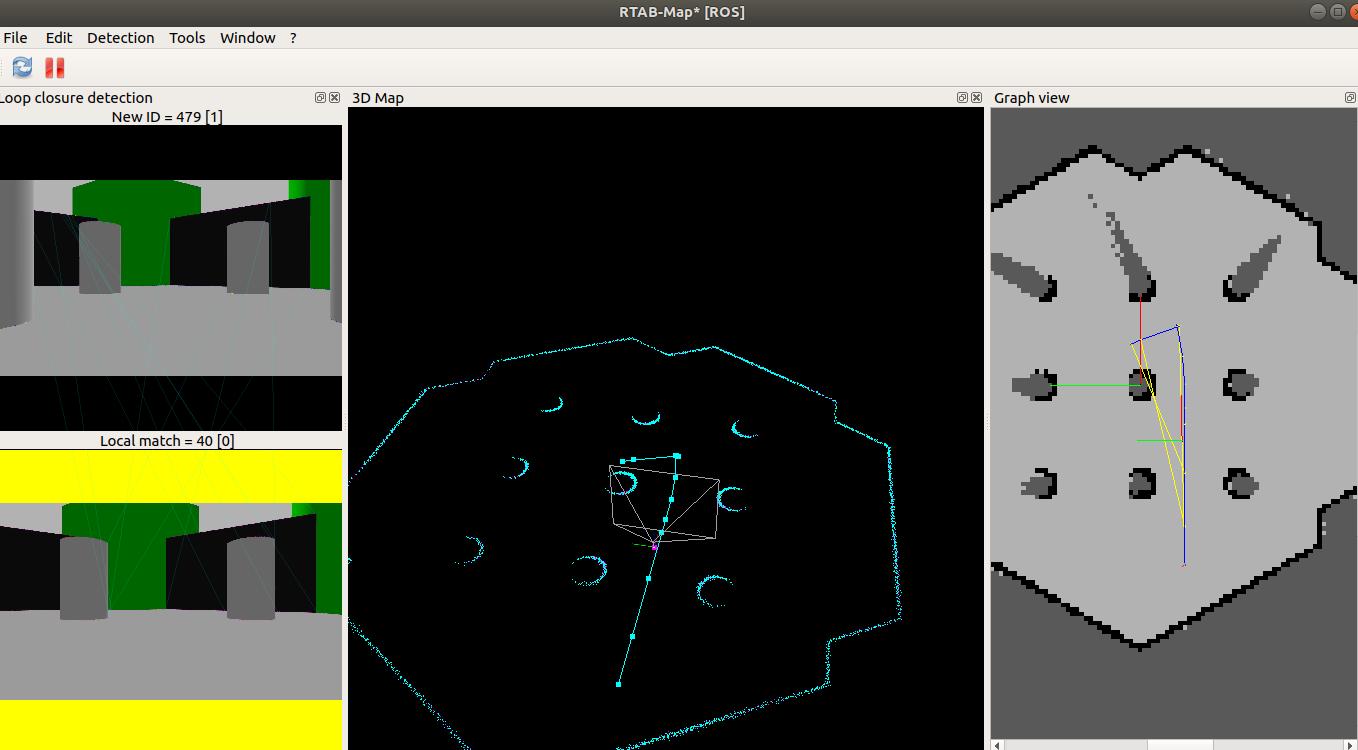
If the guess is enough close to reality, you would see yellow "Local match" in rtabmapviz, meaning that scan matching is actually localizing on the map.
Note that if you close kill terminal 2, and restart it without having moved the robot, it should be correctly localized on startup (rtabmap assumes it is restarting from last saved localization from its previous session).
To deal with "kidnapped robot problem", the environment should have more discriminating textured surfaces (avoid textureless and repetitive patterns). To do global localization automatically without the camera, you could try AMCL, though it would also require a first guess to converge correctly (and faster).
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/rtabmap-localization-error-tp7501p7535.html
Hi,
In your case, the robot won't be able to localize alone with the camera even by teleoperating it on the same path than during mapping, as the environment is textureless.
To set a localization guess manually, you can use "2D Pose Estimate" button with its topic set to /rtabmap/initialpose.
If the guess is enough close to reality, you would see yellow "Local match" in rtabmapviz, meaning that scan matching is actually localizing on the map.
Note that if you close kill terminal 2, and restart it without having moved the robot, it should be correctly localized on startup (rtabmap assumes it is restarting from last saved localization from its previous session).
To deal with "kidnapped robot problem", the environment should have more discriminating textured surfaces (avoid textureless and repetitive patterns). To do global localization automatically without the camera, you could try AMCL, though it would also require a first guess to converge correctly (and faster).
cheers,
Mathieu
| Free forum by Nabble | Edit this page |