RGB_D camera + octomap_server + rtabmap
Posted by ahmadkh1995 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-camera-octomap-server-rtabmap-tp7537.html
Hello
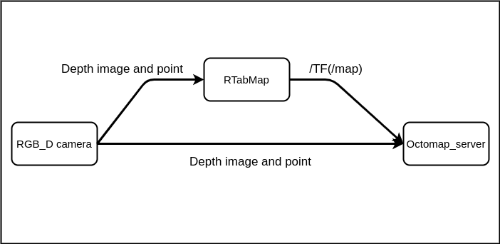
I want to implement below block diagram with a recorded rosbag , but when I want to visualize octomap(produced by octomap_server) nothing visualizes in Rviz and it's output doesn't publish.
This is my octomap_server launch file;
<node pkg="octomap_server" type="octomap_color_server_node" name="octomap_server">
<remap from="cloud_in" to="/camera/depth/points" />
</node>
and also my "frame_id" is "map" which given by rtabmap.
would you please help me where is my mistake ? I understand that some users use;
<remap from="cloud_in" to="/rtabmap/cloud_map" />
but I want to use pointcloud2 directly from my RGB-D sensor.
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-camera-octomap-server-rtabmap-tp7537.html
Hello
I want to implement below block diagram with a recorded rosbag , but when I want to visualize octomap(produced by octomap_server) nothing visualizes in Rviz and it's output doesn't publish.
This is my octomap_server launch file;
<node pkg="octomap_server" type="octomap_color_server_node" name="octomap_server">
<remap from="cloud_in" to="/camera/depth/points" />
</node>
and also my "frame_id" is "map" which given by rtabmap.
would you please help me where is my mistake ? I understand that some users use;
<remap from="cloud_in" to="/rtabmap/cloud_map" />
but I want to use pointcloud2 directly from my RGB-D sensor.
| Free forum by Nabble | Edit this page |