Re: RGB_D camera + octomap_server + rtabmap
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-camera-octomap-server-rtabmap-tp7537p7593.html
Hi,
I tried octomap_server and it seems to work. I tested with demo_robot_mapping.launch with this line set to true to produce a 3D map.
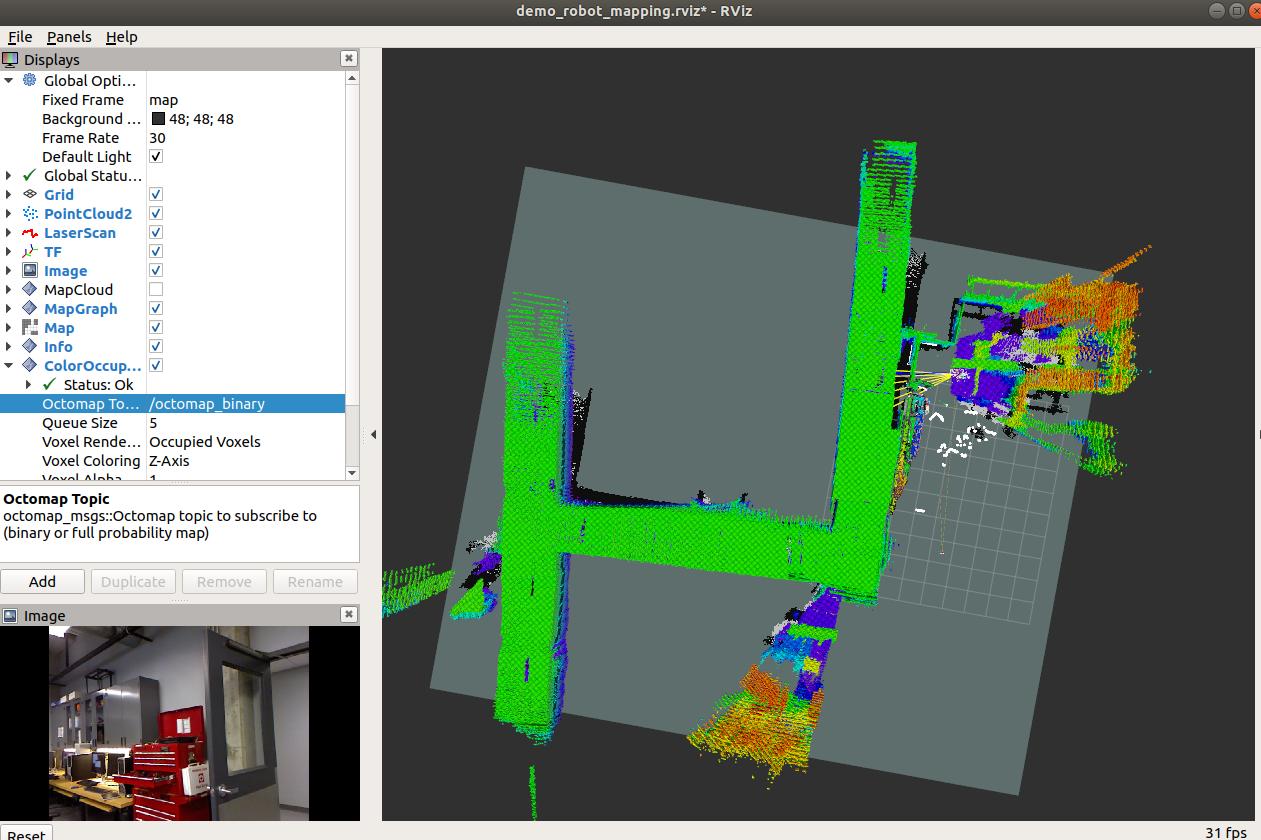
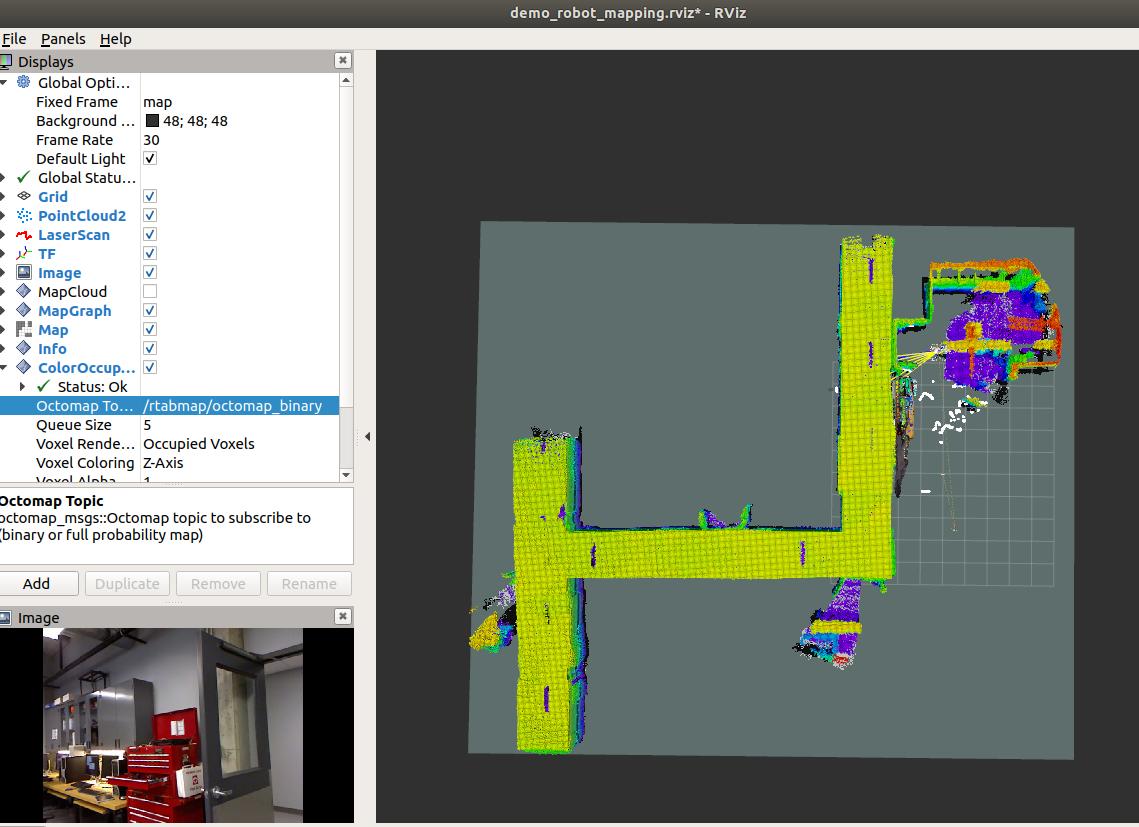
What I see comparing the OctoMaps, is that on loop closure, the OctoMap cannot correct the previous cells. Rtabmap updates the Octomap on loop closure correction.
octomap_server:
rtabmap:
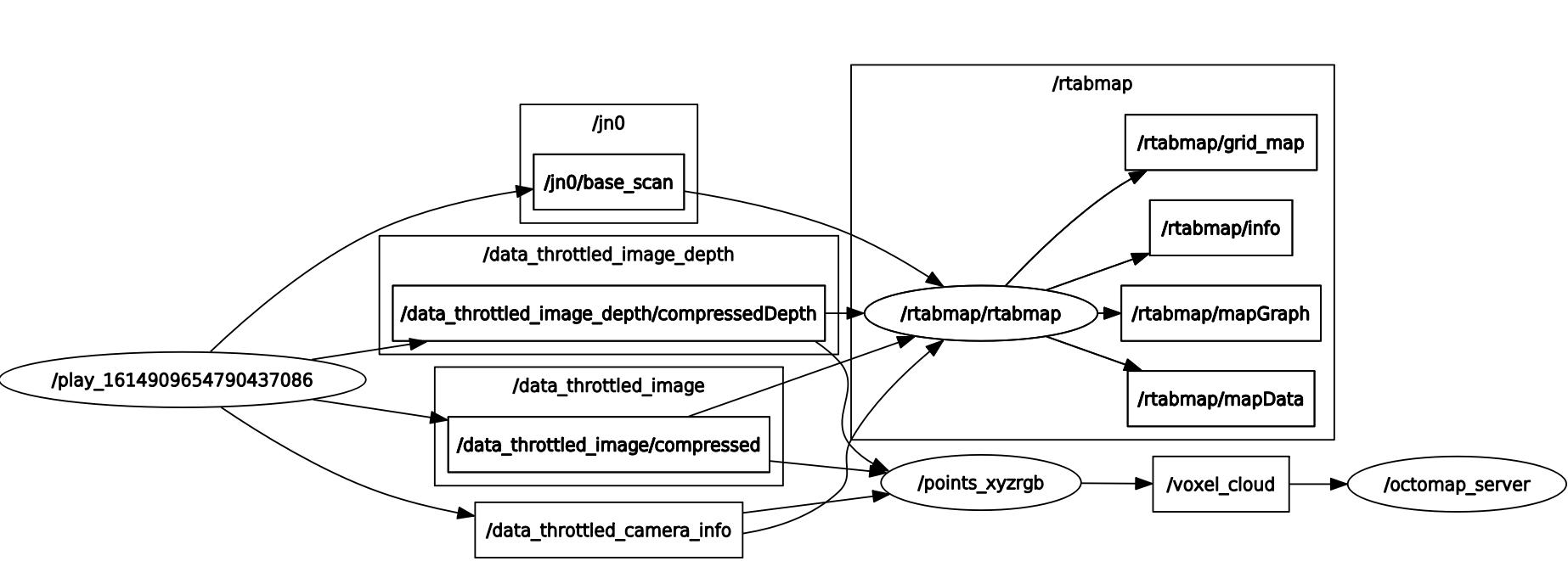
EDIT: the rqt_graph
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/RGB-D-camera-octomap-server-rtabmap-tp7537p7593.html
Hi,
I tried octomap_server and it seems to work. I tested with demo_robot_mapping.launch with this line set to true to produce a 3D map.
$ roslaunch rtabmap_ros demo_robot_mapping.launch rviz:=true rtabmapviz:=false $ rosrun octomap_server octomap_color_server_node cloud_in:=/voxel_cloud $ rosbag play --clock demo_mapping.bag
What I see comparing the OctoMaps, is that on loop closure, the OctoMap cannot correct the previous cells. Rtabmap updates the Octomap on loop closure correction.
octomap_server:
rtabmap:
EDIT: the rqt_graph
cheers,
Mathieu
| Free forum by Nabble | Edit this page |