Re: Errors on icp odometry
Posted by Mikor on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Errors-on-icp-odometry-tp7546p7608.html
Hi Mathieu,
I think I fixed the pointcloud, here is the bag, I attach the full bag this time. It is a scan of a nice building in Barcelona and I did not want it to go to waste. (I merged every two messages of the topic using the point_cloud_assembler.)
Anyway, I am trying to do for starters only icp odometry with it using the following parameters.
But it fails miserably, the course of odometry goes wild and finally drifts away. And it makes me thinking how can it go so bad when at most of the kitti datasets I run with the same parameters it worked good enough. Anyway I turned the point to plane off and this odometry is the result.
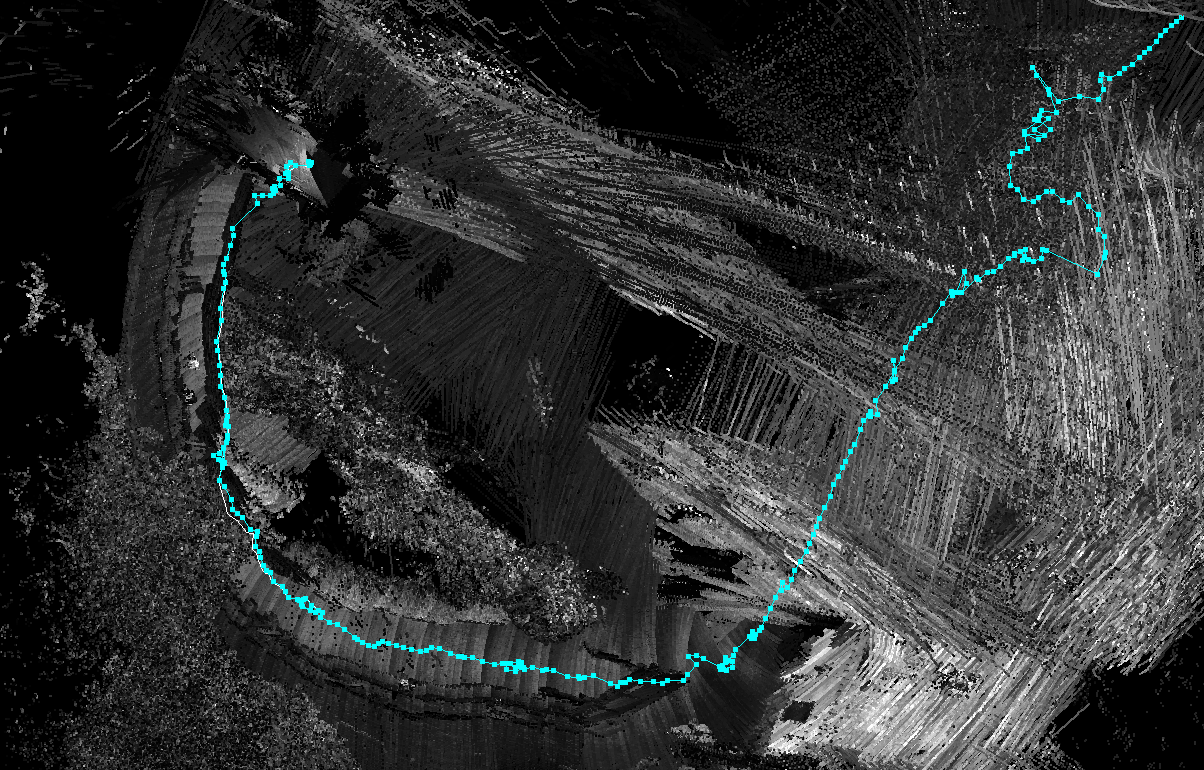
Also the pointcloud is disappointing. Do you have any suggestions..?
URL: http://official-rtab-map-forum.206.s1.nabble.com/Errors-on-icp-odometry-tp7546p7608.html
Hi Mathieu,
I think I fixed the pointcloud, here is the bag, I attach the full bag this time. It is a scan of a nice building in Barcelona and I did not want it to go to waste. (I merged every two messages of the topic using the point_cloud_assembler.)
Anyway, I am trying to do for starters only icp odometry with it using the following parameters.
$ roslaunch rtabmap_ros rtabmap.launch use_sim_time:=true depth:=false subscribe_scan_cloud:=true frame_id:=velodyne scan_cloud_topic:=/pointcloud2 scan_cloud_max_points:=131072 icp_odometry:=true approx_sync:=false args:="-d \
--RGBD/CreateOccupancyGrid false \
--Rtabmap/DetectionRate 2 \
--Odom/ScanKeyFrameThr 0.8 \
--OdomF2M/ScanMaxSize 10000 \
--OdomF2M/ScanSubtractRadius 0.5 \
--Icp/PM true \
--Icp/VoxelSize 0.5 \
--Icp/MaxTranslation 2 \
--Icp/MaxCorrespondenceDistance 1.5 \
--Icp/PMOutlierRatio 0.7 \
--Icp/Iterations 10 \
--Icp/PointToPlane true \
--Icp/PMMatcherKnn 20 \
--Icp/PMMatcherEpsilon 5 \
--Icp/Epsilon 0.0001 \
--Icp/PointToPlaneK 5 \
--Icp/PointToPlaneRadius 0 \
--Icp/CorrespondenceRatio 0.01 \
--Icp/MaxTranslations 5 \
--Icp/MaxRotations 1.5"But it fails miserably, the course of odometry goes wild and finally drifts away. And it makes me thinking how can it go so bad when at most of the kitti datasets I run with the same parameters it worked good enough. Anyway I turned the point to plane off and this odometry is the result.
Also the pointcloud is disappointing. Do you have any suggestions..?
| Free forum by Nabble | Edit this page |