Re: KITTI 00 sequence & rtabmap.
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/KITTI-00-sequence-rtabmap-tp7625p7657.html
Hi Mikor,
Here my stats:
I would expect 900-940 nodes in your map (for 2 Hz during 470 sec). Can you show processing time for odometry?
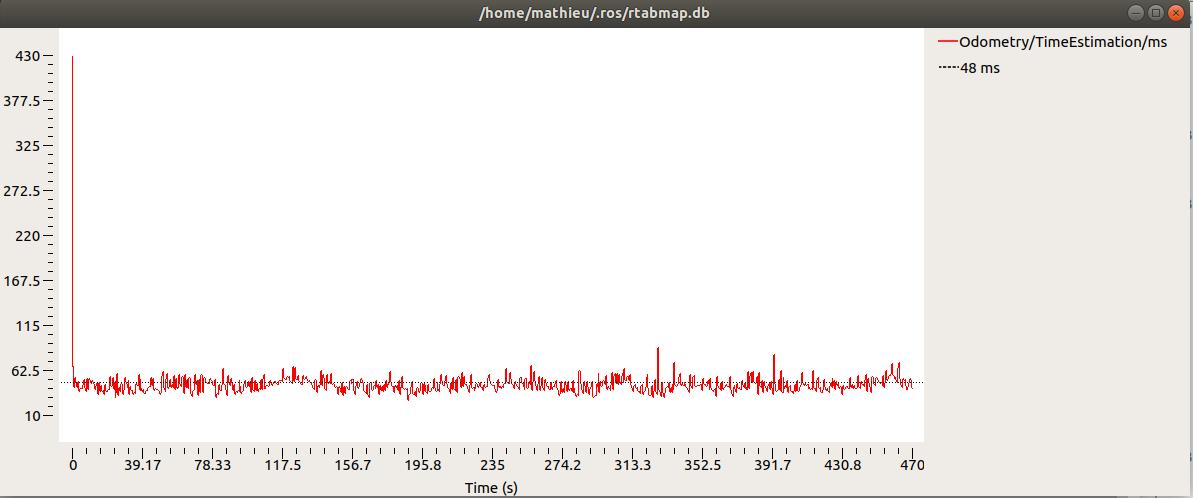
On my laptop it is able to process all velodyne point clouds (< 100 ms processing time).
URL: http://official-rtab-map-forum.206.s1.nabble.com/KITTI-00-sequence-rtabmap-tp7625p7657.html
Hi Mikor,
Here my stats:
Info: Path: /home/mathieu/.ros/rtabmap.db Version: 0.20.9 Sessions: 1 Total odometry length:3710.642822 m Total time: 470.581516s LTM: 909 nodes and 0 words (dim=0 type=8U) WM: 907 nodes and 0 words Global graph: 909 poses and 1818 links Optimized graph: 907 poses Maps in graph: 1/1 [0(907)] Ground truth: 0 poses GPS: 0 poses Links: Neighbor: 1812 GlobalClosure: 0 LocalSpaceClosure:6 LocalTimeClosure: 0 UserClosure: 0 VirtualClosure: 0 NeighborMerged: 0 PosePrior: 0 Landmark: 0 Gravity: 0 Database size: 863 MB Nodes size: 145 KB (0.02%) Links size: 623 KB (0.07%) RGB Images size: 0 Bytes (0.00%) Depth Images size: 0 Bytes (0.00%) Calibrations size: 0 Bytes (0.00%) Grids size: 10 KB (0.00%) Scans size: 858 MB (99.49%) User data size: 0 Bytes (0.00%) Dictionary size: 0 Bytes (0.00%) Features size: 0 Bytes (0.00%) Statistics size: 1 MB (0.15%) Other (indexing, unused):2 MB (0.27%)
I would expect 900-940 nodes in your map (for 2 Hz during 470 sec). Can you show processing time for odometry?
rtabmap-report Odometry/TimeEstimation/ms ~/.ros/rtabmap.db
On my laptop it is able to process all velodyne point clouds (< 100 ms processing time).
| Free forum by Nabble | Edit this page |