RTABMAP: lidar mapping
Posted by Sonic1991 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-lidar-mapping-tp7725.html
Hi.
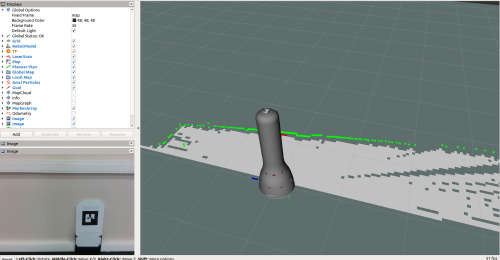
I am exploring the possibilities of rtabmap. I recently tried to tune rtabmap to use a lidar to build a map. But I ran into the following problem: The map that rtabmap builds has no obstacle cells. How could I fix this?
Thank you very much for your response.
-----------------------------------------------------
-----------------------------------------------------
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTABMAP-lidar-mapping-tp7725.html
Hi.
I am exploring the possibilities of rtabmap. I recently tried to tune rtabmap to use a lidar to build a map. But I ran into the following problem: The map that rtabmap builds has no obstacle cells. How could I fix this?
Thank you very much for your response.
-----------------------------------------------------
-----------------------------------------------------
SUMMARY
========
PARAMETERS
* /robot_description: <?xml version="1....
* /robot_state_publisher/publish_frequency: 50.0
* /robot_state_publisher/tf_prefix:
* /rosdistro: melodic
* /rosversion: 1.14.10
* /rtabmap/rtabmap/Grid/3D: False
* /rtabmap/rtabmap/Grid/FromDepth: False
* /rtabmap/rtabmap/Grid/MaxGroundHeight: 2
* /rtabmap/rtabmap/Grid/NoiseFilteringRadius: 0
* /rtabmap/rtabmap/Grid/RangeMax: 5.0
* /rtabmap/rtabmap/Grid/RayTracing: True
* /rtabmap/rtabmap/Grid/Scan2dUnknownSpaceFilled: True
* /rtabmap/rtabmap/Mem/IncrementalMemory: true
* /rtabmap/rtabmap/RGBD/CreateOccupancyGrid: false
* /rtabmap/rtabmap/RGBD/OptimizeFromGraphEnd: false
* /rtabmap/rtabmap/Reg/Force3DoF: True
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/database_path: ~/.ros/rtabmap.db
* /rtabmap/rtabmap/frame_id: base_footprint
* /rtabmap/rtabmap/subscribe_depth: False
* /rtabmap/rtabmap/subscribe_rgb: True
* /rtabmap/rtabmap/subscribe_scan: True
* /rtabmap/rtabmap/use_action_for_goal: True
* /rtabmap/rtabmap/use_saved_map: False
* /rtabmap/rtabmap/visual_odometry: fasle
-----------------------------------------------------
NODES
/
camera_stereo_odom_link (tf/static_transform_publisher)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
ROS_MASTER_URI=http://localhost:11311
process[camera_stereo_odom_link-1]: started with pid [18199]
process[robot_state_publisher-2]: started with pid [18200]
process[rtabmap/rtabmap-3]: started with pid [18201]
[ INFO] [1616756995.024570920]: Starting node...
[ INFO] [1616756995.050191725]: Initializing nodelet with 8 worker threads.
[ INFO] [1616756995.115570865]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1616756995.115637022]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1616756995.115650791]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1616756995.115666383]: /rtabmap/rtabmap(maps): map_always_update = false
[ INFO] [1616756995.115678911]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
[ INFO] [1616756995.115691269]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1616756995.115705093]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1616756995.115719330]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1616756995.124510028]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ WARN] [1616756995.135649641]: Parameter "flip_scan" doesn't exist anymore. Rtabmap now detects automatically if the laser is upside down with /tf, then if so, it switches scan values.
[ INFO] [1616756995.135677704]: rtabmap: frame_id = base_footprint
[ INFO] [1616756995.135694521]: rtabmap: map_frame_id = map
[ INFO] [1616756995.135705288]: rtabmap: use_action_for_goal = true
[ INFO] [1616756995.135719467]: rtabmap: tf_delay = 0.050000
[ INFO] [1616756995.135729697]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1616756995.135738999]: rtabmap: odom_sensor_sync = false
[ INFO] [1616756995.170252493]: Setting RTAB-Map parameter "Grid/3D"="false"
[ INFO] [1616756995.173384864]: Setting RTAB-Map parameter "Grid/FlatObstacleDetected"="false"
[ INFO] [1616756995.175477397]: Setting RTAB-Map parameter "Grid/FromDepth"="false"
[ INFO] [1616756995.177612217]: Setting RTAB-Map parameter "Grid/MaxGroundHeight"="2"
[ INFO] [1616756995.180269977]: Setting RTAB-Map parameter "Grid/NoiseFilteringRadius"="0"
[ INFO] [1616756995.182396949]: Setting RTAB-Map parameter "Grid/RangeMax"="5.0"
[ INFO] [1616756995.182661222]: Setting RTAB-Map parameter "Grid/RangeMin"="0.1"
[ INFO] [1616756995.183061739]: Setting RTAB-Map parameter "Grid/RayTracing"="true"
[ INFO] [1616756995.183523827]: Setting RTAB-Map parameter "Grid/Scan2dUnknownSpaceFilled"="true"
[ INFO] [1616756995.186049708]: Setting RTAB-Map parameter "GridGlobal/FullUpdate"="true"
[ INFO] [1616756995.186884320]: Setting RTAB-Map parameter "GridGlobal/MinSize"="20"
[ INFO] [1616756995.191376873]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.2"
[ INFO] [1616756995.202483487]: Setting RTAB-Map parameter "Icp/RangeMax"="0"
[ INFO] [1616756995.203319338]: Setting RTAB-Map parameter "Icp/VoxelSize"="0.05"
[ INFO] [1616756995.235473446]: Setting RTAB-Map parameter "Mem/IncrementalMemory"="true"
[ INFO] [1616756995.263481374]: Setting RTAB-Map parameter "RGBD/CreateOccupancyGrid"="false"
[ INFO] [1616756995.273391710]: Setting RTAB-Map parameter "RGBD/NeighborLinkRefining"="true"
[ INFO] [1616756995.274389584]: Setting RTAB-Map parameter "RGBD/OptimizeFromGraphEnd"="false"
[ INFO] [1616756995.278302493]: Setting RTAB-Map parameter "RGBD/ProximityBySpace"="true"
[ INFO] [1616756995.282115480]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="0"
[ INFO] [1616756995.283314565]: Setting RTAB-Map parameter "RGBD/SavedLocalizationIgnored"="true"
[ INFO] [1616756995.284417549]: Setting RTAB-Map parameter "Reg/Force3DoF"="true"
[ INFO] [1616756995.285296505]: Setting RTAB-Map parameter "Reg/Strategy"="1"
[ INFO] [1616756995.460647720]: RTAB-Map detection rate = 1.000000 Hz
[ INFO] [1616756995.461266453]: rtabmap: Deleted database "/home/robot/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
[ INFO] [1616756995.461329520]: rtabmap: Using database from "/home/robot/.ros/rtabmap.db" (0 MB).
[ INFO] [1616756995.497581510]: rtabmap: Database version = "0.20.0".
[ INFO] [1616756995.509448911]: /rtabmap/rtabmap: subscribe_depth = false
[ INFO] [1616756995.509472937]: /rtabmap/rtabmap: subscribe_rgb = true
[ INFO] [1616756995.509481359]: /rtabmap/rtabmap: subscribe_stereo = false
[ INFO] [1616756995.509510035]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1616756995.509518323]: /rtabmap/rtabmap: subscribe_odom_info = false
[ INFO] [1616756995.509537922]: /rtabmap/rtabmap: subscribe_user_data = false
[ INFO] [1616756995.509562780]: /rtabmap/rtabmap: subscribe_scan = true
[ INFO] [1616756995.509577698]: /rtabmap/rtabmap: subscribe_scan_cloud = false
[ INFO] [1616756995.509590134]: /rtabmap/rtabmap: subscribe_scan_descriptor = false
[ INFO] [1616756995.509607312]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1616756995.509625257]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1616756995.509689335]: Setup rgb-only callback
[ INFO] [1616756995.518411272]:
/rtabmap/rtabmap subscribed to (approx sync):
/camera_stereo/odom/sample,
/camera/color/image_raw,
/camera/color/camera_info,
/scan
[ INFO] [1616756995.603881709]: rtabmap 0.20.0 started...
[ WARN] (2021-03-26 18:09:55.940) MapsManager.cpp:584::updateMapCaches() Occupancy grid for location 1 should be added to global map (e..g, a ROS node is subscribed to any occupancy grid output) but it cannot be found in memory. For convenience, the occupancy grid is regenerated. Make sure parameter "RGBD/CreateOccupancyGrid" is true to avoid this warning for the next locations added to map. For older locations already in database without an occupancy grid map, you can use the "rtabmap-databaseViewer" to regenerate the missing occupancy grid maps and save them back in the database for next sessions. This warning is only shown once.
[ INFO] [1616756995.942414459]: rtabmap (1): Rate=1.00s, Limit=0.000s, RTAB-Map=0.0204s, Maps update=0.0021s pub=0.0007s (local map=1, WM=1)| Free forum by Nabble | Edit this page |