Tips about indoor mapping with laser scan.
Posted by Mikor on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Tips-about-indoor-mapping-with-laser-scan-tp7751.html
Hi Mathieu,
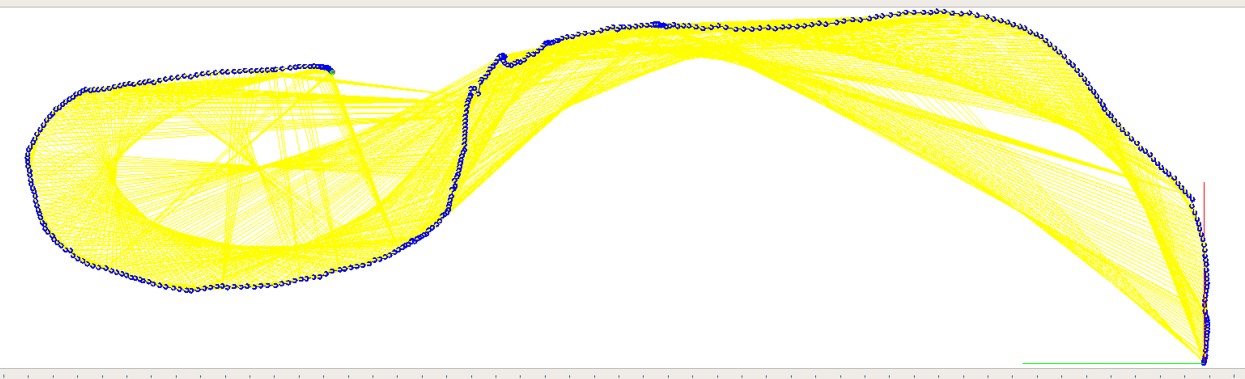
I am using a lidar for mapping and I need your help, again. I am in a situation where I get some noisy results and I do not know how to make things better. Here is the trajectory. It does not seem to be weird.
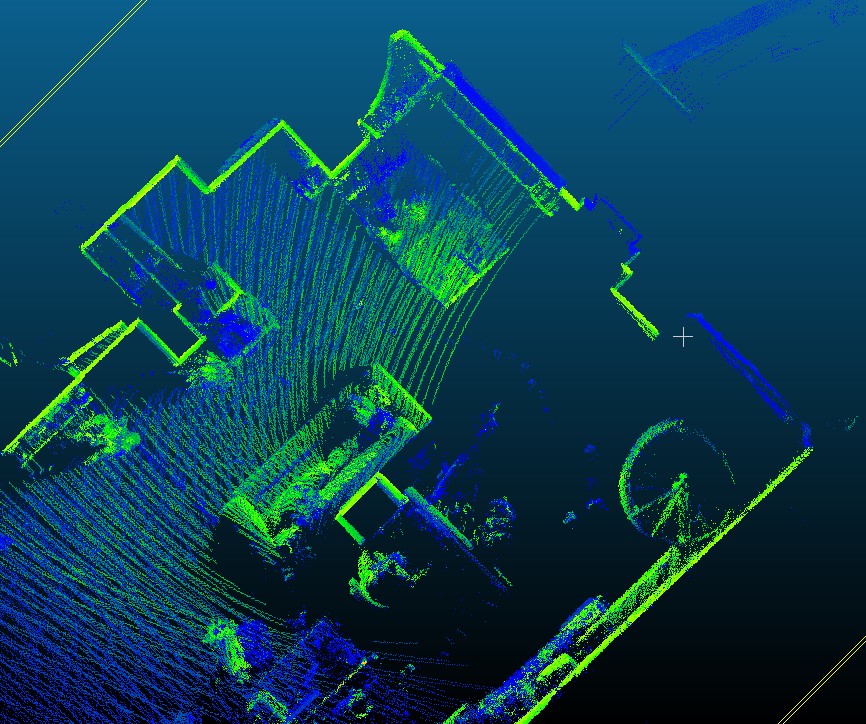
But my results are noisy here is what I mean.
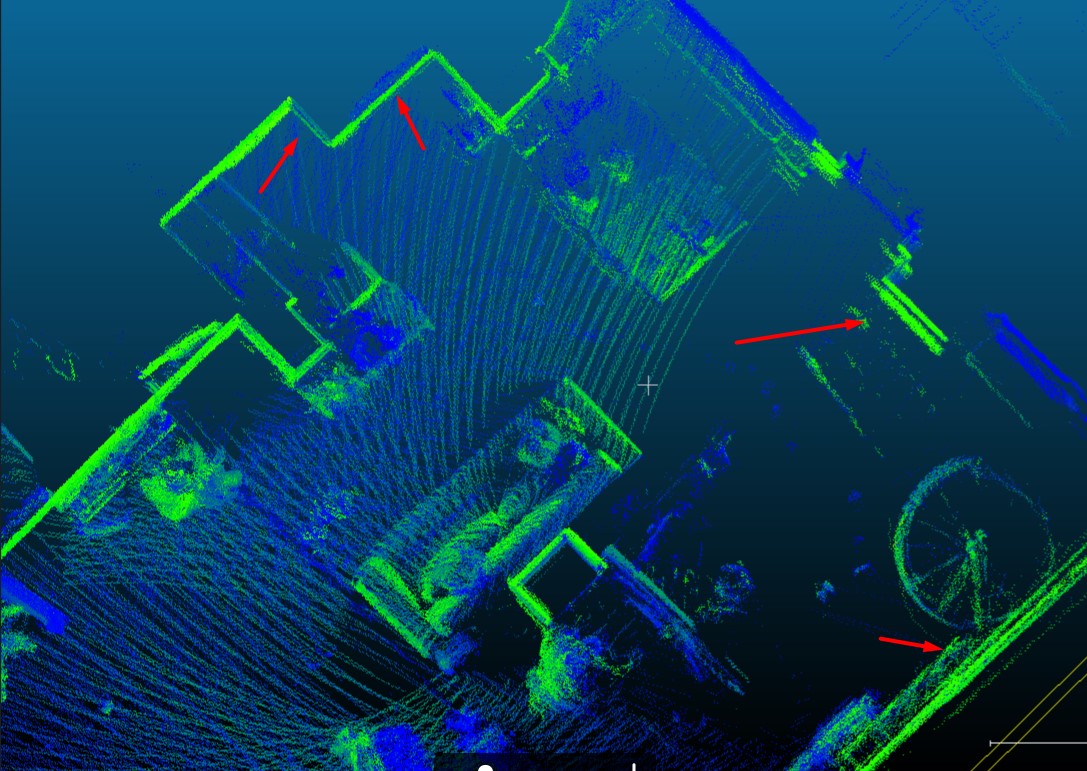
I suspect the noise comes from the turn on the left because when I split the bag in 2 parts the right side part gives better results.
So, I think it'd be nice if I could decrease the range of the observations from the lidar, is this possible to do from rtab or I can only do that from the lidar configuration? Also, I do not know if this is a suitable solution or there is something else I should try. Here are my parameters and I'd like to know if you have any tips for indoor mapping or any general guidelines?
EDIT: After further investigation I noticed that this happens when I reduce the publish rate and I include every scan in the solution, but when i increase it and cover the area sparsely the noise/mild misalignment does not exist and it got me confused, do you have any suggestions ?
Thanks in advance,
Anthony.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Tips-about-indoor-mapping-with-laser-scan-tp7751.html
Hi Mathieu,
I am using a lidar for mapping and I need your help, again. I am in a situation where I get some noisy results and I do not know how to make things better. Here is the trajectory. It does not seem to be weird.
But my results are noisy here is what I mean.
I suspect the noise comes from the turn on the left because when I split the bag in 2 parts the right side part gives better results.
So, I think it'd be nice if I could decrease the range of the observations from the lidar, is this possible to do from rtab or I can only do that from the lidar configuration? Also, I do not know if this is a suitable solution or there is something else I should try. Here are my parameters and I'd like to know if you have any tips for indoor mapping or any general guidelines?
roslaunch rtabmap_ros rtabmap.launch use_sim_time:=true depth:=false subscribe_scan_cloud:=true frame_id:=velodyne scan_cloud_topic:=/velodyne_points icp_odometry:=true approx_sync:=false args:="-d \
--RGBD/CreateOccupancyGrid false \
--Rtabmap/DetectionRate 2 \
--Odom/ScanKeyFrameThr 0.8 \
--OdomF2M/ScanMaxSize 100000000 \
--OdomF2M/ScanSubtractRadius 0.25 \
--Icp/PM true \
--Icp/VoxelSize 0.25 \
--Icp/MaxTranslation 2 \
--Icp/MaxCorrespondenceDistance 1.5 \
--Icp/PMOutlierRatio 0.7 \
--Icp/Iterations 50 \
--Icp/PointToPlane true \
--Icp/PMMatcherKnn 3 \
--Icp/PMMatcherEpsilon 1 \
--Icp/Epsilon 0.0001 \
--Icp/PointToPlaneK 10 \
--Icp/PointToPlaneRadius 0 \
--Icp/CorrespondenceRatio 0.01 \
--RGBD/NeighborLinkRefining true"EDIT: After further investigation I noticed that this happens when I reduce the publish rate and I include every scan in the solution, but when i increase it and cover the area sparsely the noise/mild misalignment does not exist and it got me confused, do you have any suggestions ?
Thanks in advance,
Anthony.
| Free forum by Nabble | Edit this page |