Re: Some problems of TF and navigation
Posted by Kevin33173 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Some-problems-of-TF-and-navigation-tp7785p7802.html
Hello, My rtabmap version is melodic.
I had follow tutorials which you post, and I didn't use imu data this time.
http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot#Kinect_.2B-_Odometry_.2B-_2D_laser
then, I change my TF to let base_link be child of base_footprint.
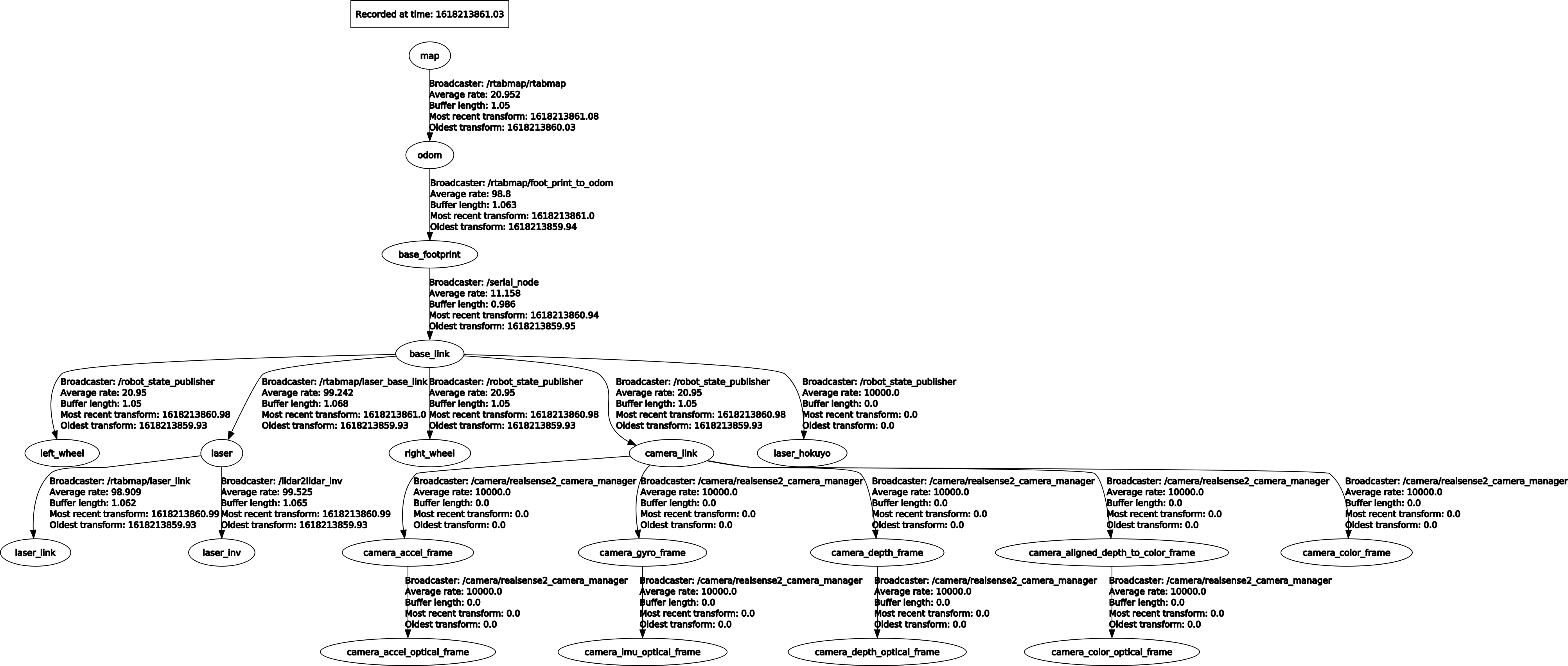
This is my new graph and TF_tree,
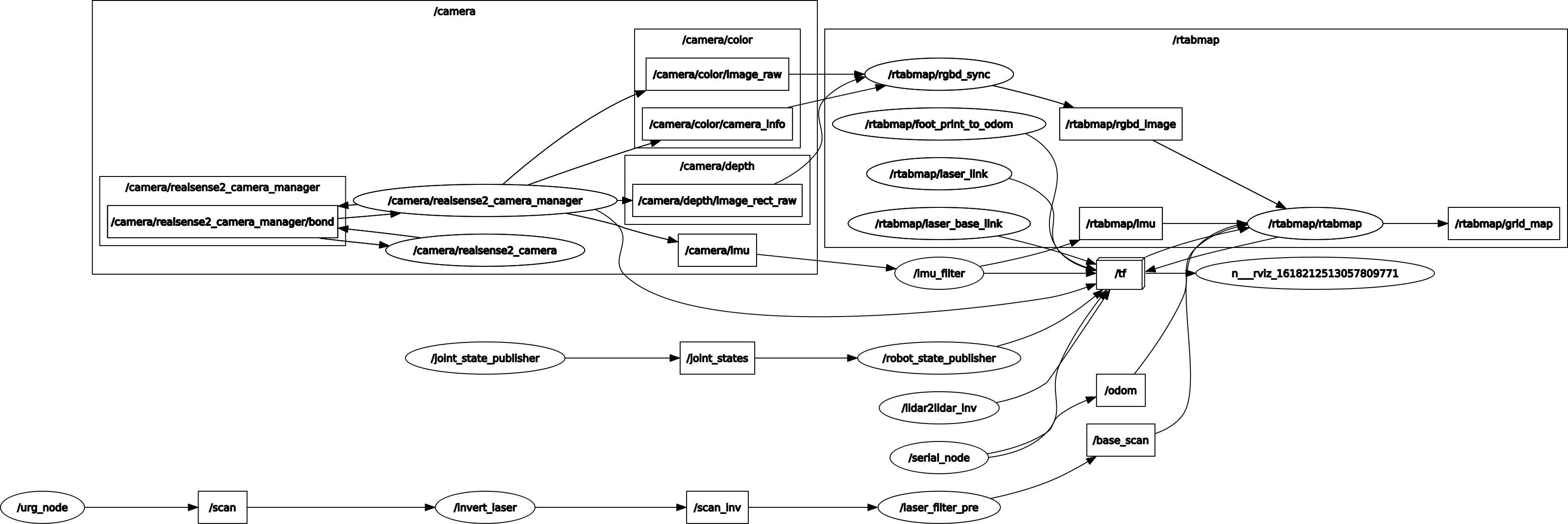
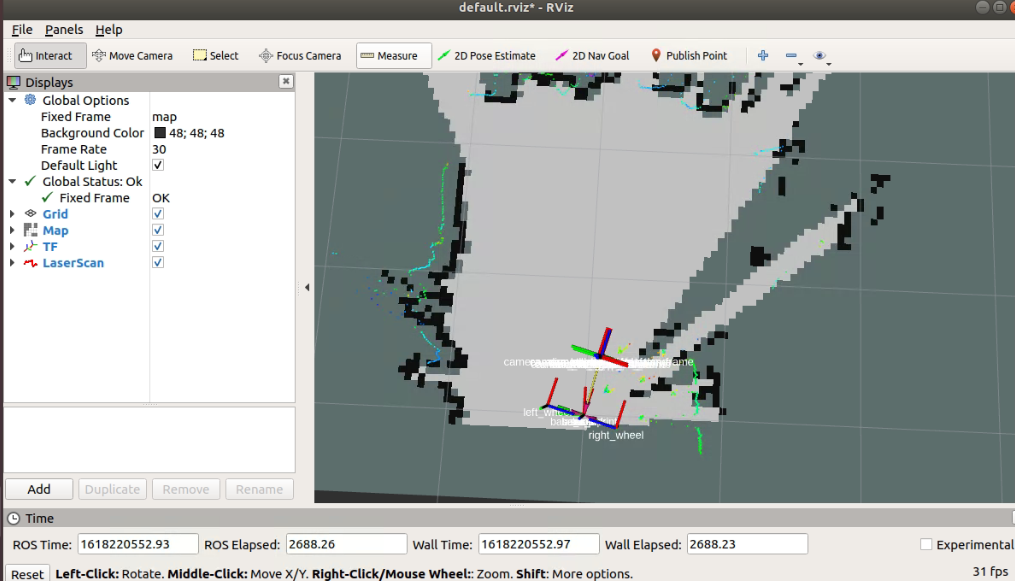
now I have new problem, when I was create map(rtabmap.launch works well), even though my robot was moving, map wasn't update .
You can see that scanning data was different, but map didn't update
This is my rtabmap.launch, do I need to set more parameters?
rtabmap_test.launch
URL: http://official-rtab-map-forum.206.s1.nabble.com/Some-problems-of-TF-and-navigation-tp7785p7802.html
Hello, My rtabmap version is melodic.
I had follow tutorials which you post, and I didn't use imu data this time.
http://wiki.ros.org/rtabmap_ros/Tutorials/SetupOnYourRobot#Kinect_.2B-_Odometry_.2B-_2D_laser
then, I change my TF to let base_link be child of base_footprint.
This is my new graph and TF_tree,
now I have new problem, when I was create map(rtabmap.launch works well), even though my robot was moving, map wasn't update .
You can see that scanning data was different, but map didn't update
This is my rtabmap.launch, do I need to set more parameters?
rtabmap_test.launch
| Free forum by Nabble | Edit this page |