Re: Navigation with RTAB-Map
Posted by Noctis on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigation-with-RTAB-Map-tp7816p7821.html
Hi Mattieu, thanks for the reply! Will take some time to tidy up the launch file!
Actually.. what is the difference between choosing base_link vs base_footprint for frame_id? For odometry, I am using ORB-SLAM2.
By the way, if I use ORB-SLAM2 as odometry for mapping, must I also use ORB-SLAM2 during localisation? Or would you recommend using RTAB-Map's?
If my robot is able to localize itself in the /rtabmap/grid_map, do i still have to use the 2D Pose Estimate?
Also, for move_base related topics, I see that my rostopic list outputs:
/mobile_base/sensors/bumper_pointcloud
/move_base/TrajectoryPlannerROS/global_plan
/move_base/TrajectoryPlannerROS/local_plan
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/particlecloud
/planner/cmd_vel
/planner/move_base/DWAPlannerROS/cost_cloud
/planner/move_base/DWAPlannerROS/global_plan
/planner/move_base/DWAPlannerROS/local_plan
/planner/move_base/DWAPlannerROS/parameter_descriptions
/planner/move_base/DWAPlannerROS/parameter_updates
/planner/move_base/DWAPlannerROS/trajectory_cloud
/planner/move_base/NavfnROS/plan
/planner/move_base/cancel
/planner/move_base/current_goal
/planner/move_base/feedback
/planner/move_base/global_costmap/costmap
/planner/move_base/global_costmap/costmap_updates
/planner/move_base/global_costmap/footprint
/planner/move_base/global_costmap/inflation_layer/parameter_descriptions
/planner/move_base/global_costmap/inflation_layer/parameter_updates
/planner/move_base/global_costmap/obstacle_layer/parameter_descriptions
/planner/move_base/global_costmap/obstacle_layer/parameter_updates
/planner/move_base/global_costmap/parameter_descriptions
/planner/move_base/global_costmap/parameter_updates
/planner/move_base/global_costmap/static_layer/parameter_descriptions
/planner/move_base/global_costmap/static_layer/parameter_updates
/planner/move_base/goal
/planner/move_base/local_costmap/costmap
/planner/move_base/local_costmap/costmap_updates
/planner/move_base/local_costmap/footprint
/planner/move_base/local_costmap/inflation_layer/parameter_descriptions
/planner/move_base/local_costmap/inflation_layer/parameter_updates
/planner/move_base/local_costmap/obstacle_layer/parameter_descriptions
/planner/move_base/local_costmap/obstacle_layer/parameter_updates
/planner/move_base/local_costmap/parameter_descriptions
/planner/move_base/local_costmap/parameter_updates
/planner/move_base/local_costmap/static_layer/parameter_descriptions
/planner/move_base/local_costmap/static_layer/parameter_updates
/planner/move_base/parameter_descriptions
/planner/move_base/parameter_updates
/planner/move_base/result
/planner/move_base/status
/planner/odom
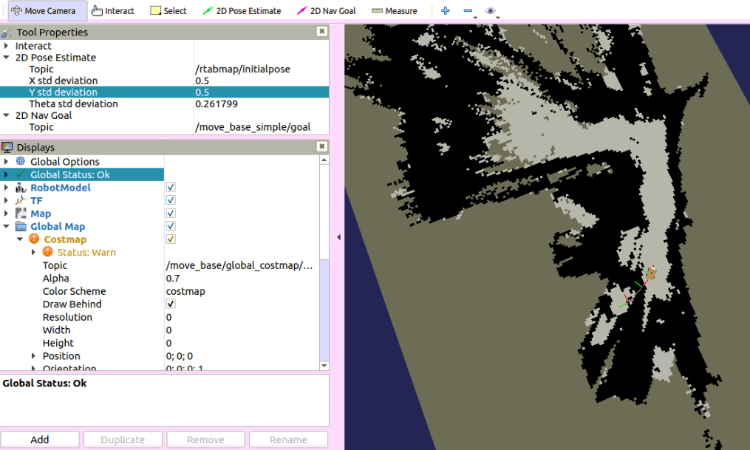
In Tool Properties, the 2D Nav Goal topic is subscribed to /move_base_simple/goal
The global and local costmaps are subscribed to /move_base/global_costmap/costmap and /move_base/local_costmap/costmap respectively. When i clicked on the topics, only planner/move_base/global_costmap/costmap and planner/move_base/local_costmap/costmap appeared and those are working. Could I get an explanation whats the difference between the planner and the non-planner topics and should I change the 2D Nav Goal topic to anything else?
I had to change the Planner under the Global Map to /planner/move_base/NavfnROS/plan for the global path to show up. Is that supposed to be the case?
I also changed my subscribed topic from my arduino from /cmd_vel to /planner/cmd_vel but it just rotates in place
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigation-with-RTAB-Map-tp7816p7821.html
Hi Mattieu, thanks for the reply! Will take some time to tidy up the launch file!
Actually.. what is the difference between choosing base_link vs base_footprint for frame_id? For odometry, I am using ORB-SLAM2.
By the way, if I use ORB-SLAM2 as odometry for mapping, must I also use ORB-SLAM2 during localisation? Or would you recommend using RTAB-Map's?
If my robot is able to localize itself in the /rtabmap/grid_map, do i still have to use the 2D Pose Estimate?
Also, for move_base related topics, I see that my rostopic list outputs:
/mobile_base/sensors/bumper_pointcloud
/move_base/TrajectoryPlannerROS/global_plan
/move_base/TrajectoryPlannerROS/local_plan
/move_base/global_costmap/costmap
/move_base/global_costmap/costmap_updates
/move_base/local_costmap/costmap
/move_base/local_costmap/costmap_updates
/move_base_simple/goal
/particlecloud
/planner/cmd_vel
/planner/move_base/DWAPlannerROS/cost_cloud
/planner/move_base/DWAPlannerROS/global_plan
/planner/move_base/DWAPlannerROS/local_plan
/planner/move_base/DWAPlannerROS/parameter_descriptions
/planner/move_base/DWAPlannerROS/parameter_updates
/planner/move_base/DWAPlannerROS/trajectory_cloud
/planner/move_base/NavfnROS/plan
/planner/move_base/cancel
/planner/move_base/current_goal
/planner/move_base/feedback
/planner/move_base/global_costmap/costmap
/planner/move_base/global_costmap/costmap_updates
/planner/move_base/global_costmap/footprint
/planner/move_base/global_costmap/inflation_layer/parameter_descriptions
/planner/move_base/global_costmap/inflation_layer/parameter_updates
/planner/move_base/global_costmap/obstacle_layer/parameter_descriptions
/planner/move_base/global_costmap/obstacle_layer/parameter_updates
/planner/move_base/global_costmap/parameter_descriptions
/planner/move_base/global_costmap/parameter_updates
/planner/move_base/global_costmap/static_layer/parameter_descriptions
/planner/move_base/global_costmap/static_layer/parameter_updates
/planner/move_base/goal
/planner/move_base/local_costmap/costmap
/planner/move_base/local_costmap/costmap_updates
/planner/move_base/local_costmap/footprint
/planner/move_base/local_costmap/inflation_layer/parameter_descriptions
/planner/move_base/local_costmap/inflation_layer/parameter_updates
/planner/move_base/local_costmap/obstacle_layer/parameter_descriptions
/planner/move_base/local_costmap/obstacle_layer/parameter_updates
/planner/move_base/local_costmap/parameter_descriptions
/planner/move_base/local_costmap/parameter_updates
/planner/move_base/local_costmap/static_layer/parameter_descriptions
/planner/move_base/local_costmap/static_layer/parameter_updates
/planner/move_base/parameter_descriptions
/planner/move_base/parameter_updates
/planner/move_base/result
/planner/move_base/status
/planner/odom
In Tool Properties, the 2D Nav Goal topic is subscribed to /move_base_simple/goal
The global and local costmaps are subscribed to /move_base/global_costmap/costmap and /move_base/local_costmap/costmap respectively. When i clicked on the topics, only planner/move_base/global_costmap/costmap and planner/move_base/local_costmap/costmap appeared and those are working. Could I get an explanation whats the difference between the planner and the non-planner topics and should I change the 2D Nav Goal topic to anything else?
I had to change the Planner under the Global Map to /planner/move_base/NavfnROS/plan for the global path to show up. Is that supposed to be the case?
I also changed my subscribed topic from my arduino from /cmd_vel to /planner/cmd_vel but it just rotates in place
| Free forum by Nabble | Edit this page |