Exporting single frame pointclouds and separate camera point clouds from RTabMap
Posted by FeriBolour on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Exporting-single-frame-pointclouds-and-separate-camera-point-clouds-from-RTabMap-tp7985.html
Hello Everyone,
I've been trying develop a system of multiple Intel D435is, working on a single session of RTabMap, in order to get a single PointCloud from all three cameras running at the same time.
I've adapted the Demo With Two Kinects launch file for my cameras for this purpose.
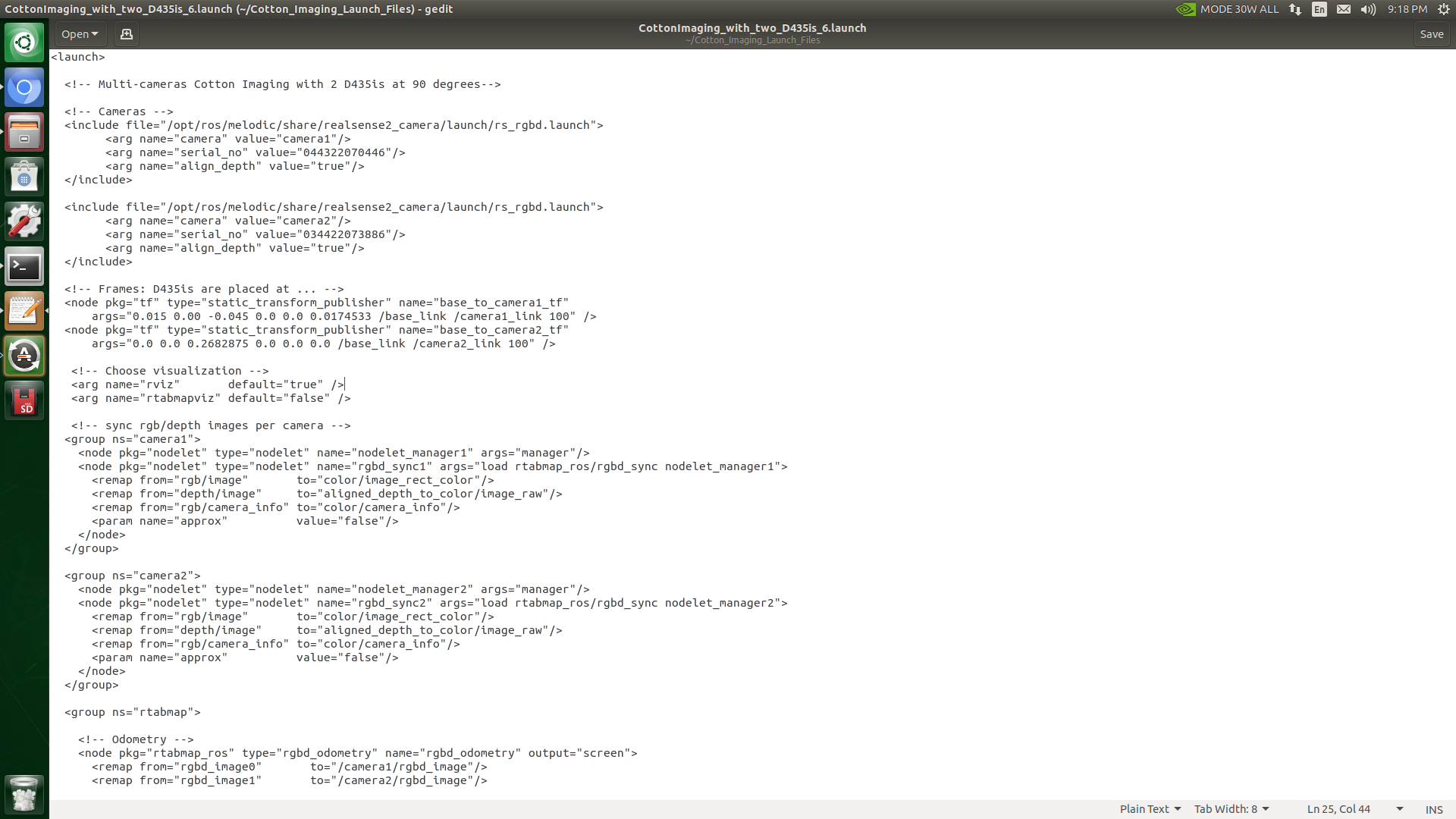
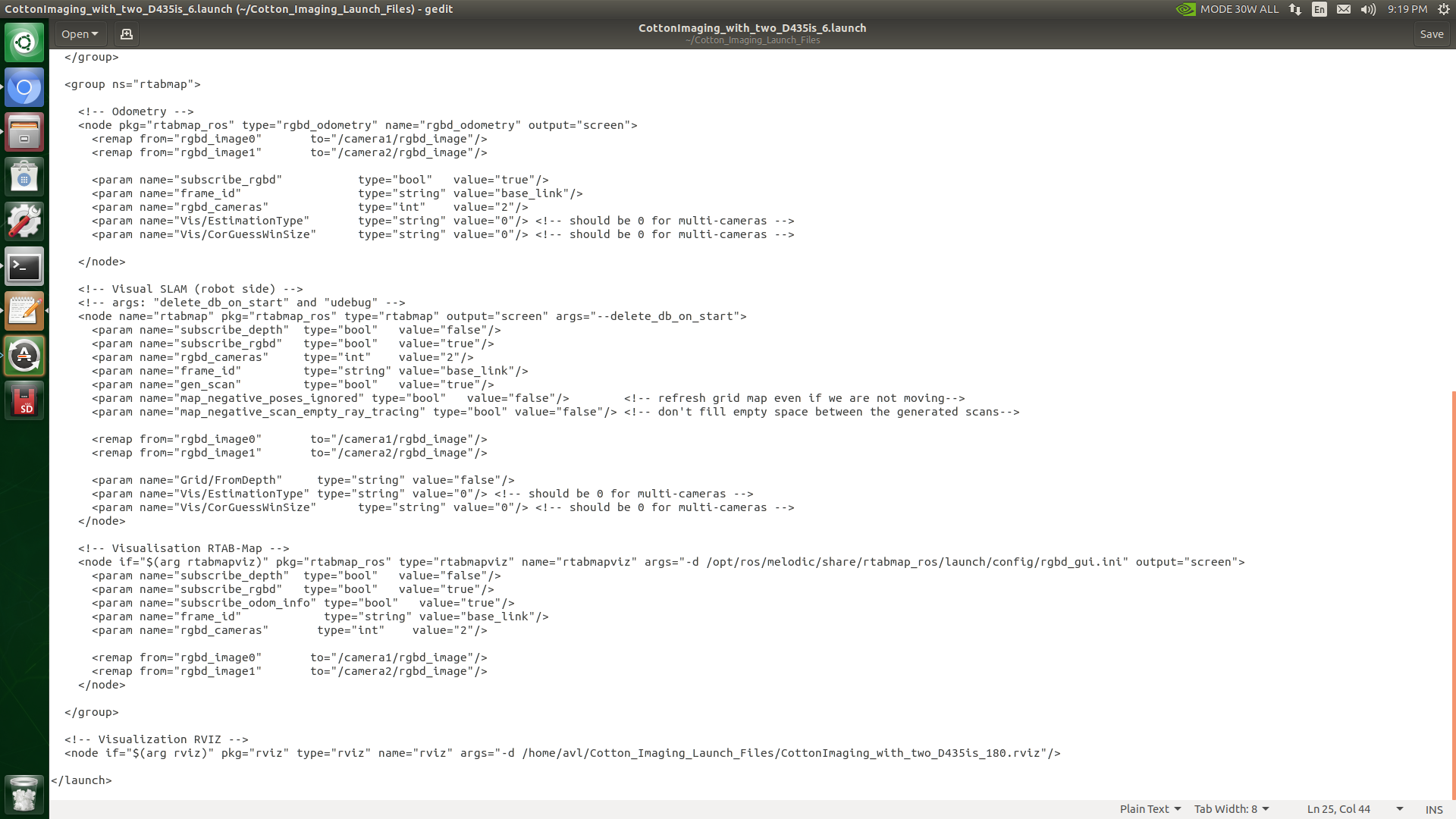
Currently I am using the RTabMap's GUI or the RTabMap's Export Tool ( with the following command: rtabmap-export --voxel 0 --max_range 1.00 ~/.ros/rtabmap.db ) to get the global map. The exported Point Cloud includes the PointClouds from each camera in one Global Map.
1. I wanted to know if it's possible to export the pointclouds from each camera separately and have them in separate files!
2. Also I wanted to know if it is possible to extract the point clouds from individual frames of the cameras before getting stitched?
Thank You
Farshad Bolouri
URL: http://official-rtab-map-forum.206.s1.nabble.com/Exporting-single-frame-pointclouds-and-separate-camera-point-clouds-from-RTabMap-tp7985.html
Hello Everyone,
I've been trying develop a system of multiple Intel D435is, working on a single session of RTabMap, in order to get a single PointCloud from all three cameras running at the same time.
I've adapted the Demo With Two Kinects launch file for my cameras for this purpose.
Currently I am using the RTabMap's GUI or the RTabMap's Export Tool ( with the following command: rtabmap-export --voxel 0 --max_range 1.00 ~/.ros/rtabmap.db ) to get the global map. The exported Point Cloud includes the PointClouds from each camera in one Global Map.
1. I wanted to know if it's possible to export the pointclouds from each camera separately and have them in separate files!
2. Also I wanted to know if it is possible to extract the point clouds from individual frames of the cameras before getting stitched?
Thank You
Farshad Bolouri
| Free forum by Nabble | Edit this page |