Re: Autonomous Navigation
Posted by g.bartoli on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-tp801p804.html
1) Yes, sorry, I mispelled the name. We verified that "gen_scan" is publishing the "grid_map".
2) I think we'll use "grid_map", since "proj_map" is messier and full of holes, but it's strange because the 3D Cloud Map seems consistent and well aligned. Maybe there is some problem with projecting ceiling points to the ground.
3) We used your launch file as reference, but there are some problems with topics and data needed by "move_base" as explained here.
Launching the "move_base" node just remapping "odom" to "/odom", but without changing other parameters or remapping arguments, this is the ROS graph showing that move_base needs two footprints and a goal.
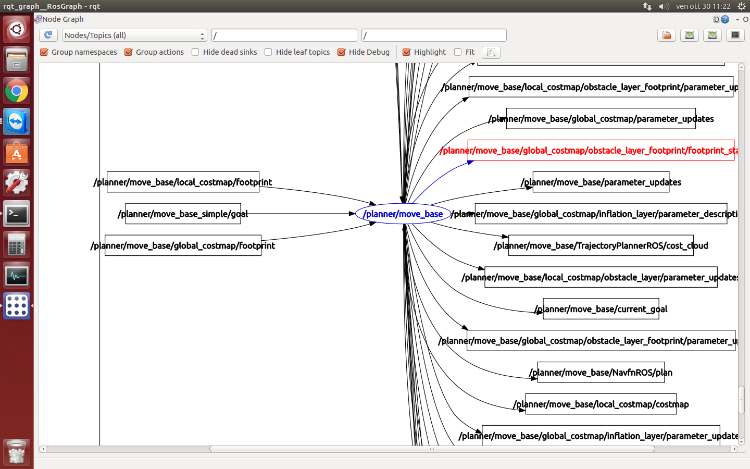
These are the topics published by rtabmap and the ones subscribed by move_base.
Looking at these "rosnode info" output and your azimut3 launch file, you remap topics that are not currently published by any node, like "/planner_cloud" or "/map", but also some "from" topics like "openni_points" or "base_scan" seem that are not needed by "move_base".
Maybe there are some topics that are implicitly loaded from the yaml files?
For example, we tried to change parameters inside the common_costmap file, but nothing seems to change. Do you have any suggestions on how to proceed?
Many thanks,
Guido
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-tp801p804.html
1) Yes, sorry, I mispelled the name. We verified that "gen_scan" is publishing the "grid_map".
2) I think we'll use "grid_map", since "proj_map" is messier and full of holes, but it's strange because the 3D Cloud Map seems consistent and well aligned. Maybe there is some problem with projecting ceiling points to the ground.
3) We used your launch file as reference, but there are some problems with topics and data needed by "move_base" as explained here.
Launching the "move_base" node just remapping "odom" to "/odom", but without changing other parameters or remapping arguments, this is the ROS graph showing that move_base needs two footprints and a goal.
These are the topics published by rtabmap and the ones subscribed by move_base.
$ rosnode info /planner/move_base Subscriptions: * /planner/move_base/local_costmap/footprint [unknown type] * /planner/move_base/cancel [unknown type] * /planner/move_base_simple/goal [unknown type] * /odom [nav_msgs/Odometry] * /planner/move_base/global_costmap/footprint [unknown type] * /tf_static [unknown type] * /planner/move_base/goal [move_base_msgs/MoveBaseActionGoal] * /tf [tf2_msgs/TFMessage] $ rosnode info /rtabmap/rtabmap Publications: * /rtabmap/goal_reached [std_msgs/Bool] * /rtabmap/goal_out [geometry_msgs/PoseStamped] * /rtabmap/labels [visualization_msgs/MarkerArray] * /rtabmap/mapGraph [rtabmap_ros/MapGraph] * /rtabmap/mapData [rtabmap_ros/MapData] * /rtabmap/cloud_map [sensor_msgs/PointCloud2] * /rtabmap/local_path [nav_msgs/Path] * /rtabmap/grid_map [nav_msgs/OccupancyGrid] * /rtabmap/move_base/cancel [actionlib_msgs/GoalID] * /tf [tf2_msgs/TFMessage] * /rtabmap/move_base/goal [move_base_msgs/MoveBaseActionGoal] * /rosout [rosgraph_msgs/Log] * /rtabmap/info [rtabmap_ros/Info] * /rtabmap/proj_map [nav_msgs/OccupancyGrid] * /rtabmap/global_path [nav_msgs/Path]
Looking at these "rosnode info" output and your azimut3 launch file, you remap topics that are not currently published by any node, like "/planner_cloud" or "/map", but also some "from" topics like "openni_points" or "base_scan" seem that are not needed by "move_base".
Maybe there are some topics that are implicitly loaded from the yaml files?
For example, we tried to change parameters inside the common_costmap file, but nothing seems to change. Do you have any suggestions on how to proceed?
Many thanks,
Guido
~Guido
| Free forum by Nabble | Edit this page |