Re: Lidar SLAM with loop closure
Posted by denzle on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-SLAM-with-loop-closure-tp7846p8094.html
Hi Mathieu,
So after much stressing and many failed test launch files i have finally got something close to my aim for loop closure. Although much is down to the new ouster launch file you recently added (so thanks for that as odometry is much more accurate and its sorted out the point cloud jumping around erratically with the ptp params you added).
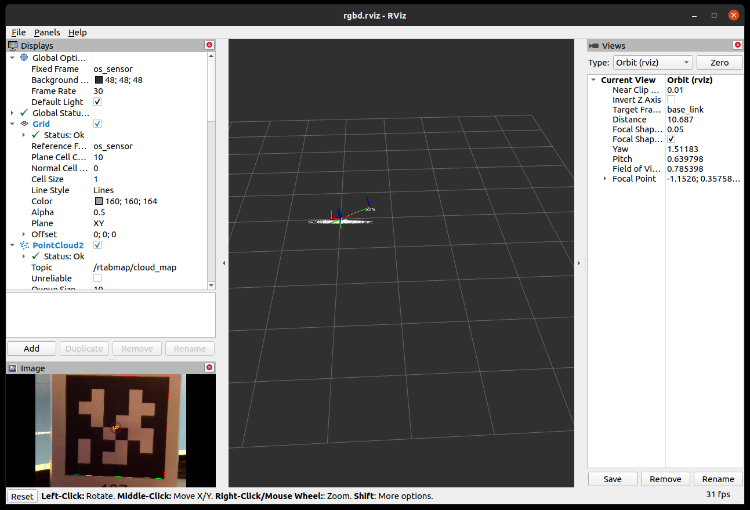
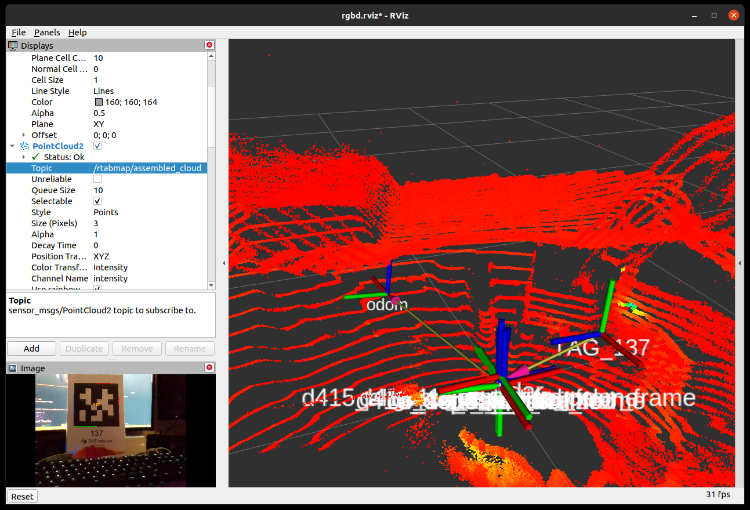
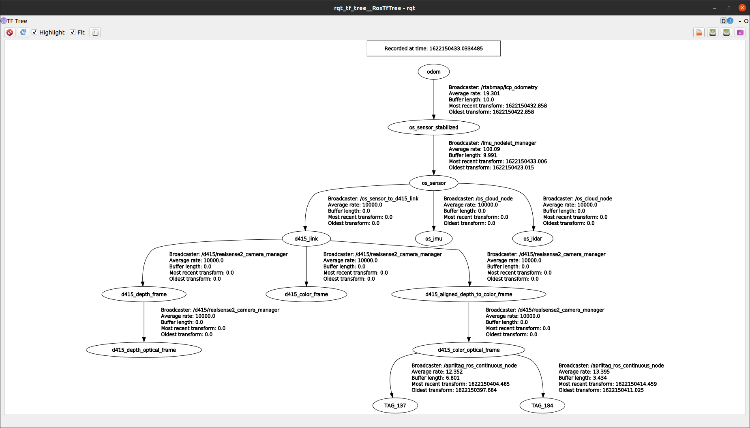
Currently i have the camera able to pick up tags but I'm not sure if they should be showing up on Rtabviz or if the camera frame should be present rather than having to use rviz. Would i need set visual odometry as well?
I am sorry to ask you to have a look over my launch file as i'm sure you're very busy, but could you offer advice of where i may be going wrong or what may need to be changed.
Many thanks
Dan
SUMMARY
========
CLEAR PARAMETERS
* /apriltag_ros_continuous_node/
PARAMETERS
* /apriltag_ros_continuous_node/camera_frame: /d415_color_optic...
* /apriltag_ros_continuous_node/publish_tag_detections_image: True
* /apriltag_ros_continuous_node/publish_tf: True
* /apriltag_ros_continuous_node/standalone_tags: [{'id': 0, 'size'...
* /apriltag_ros_continuous_node/tag_blur: 0.0
* /apriltag_ros_continuous_node/tag_border: 1
* /apriltag_ros_continuous_node/tag_bundles: [{'name': 'tag_bu...
* /apriltag_ros_continuous_node/tag_debug: 0
* /apriltag_ros_continuous_node/tag_decimate: 1.0
* /apriltag_ros_continuous_node/tag_family: tag36h11
* /apriltag_ros_continuous_node/tag_refine_decode: 0
* /apriltag_ros_continuous_node/tag_refine_edges: 1
* /apriltag_ros_continuous_node/tag_refine_pose: 0
* /apriltag_ros_continuous_node/tag_threads: 2
* /d415/rgbd_sync/approx_sync: True
* /imu_filter/publish_tf: False
* /imu_filter/use_mag: False
* /imu_filter/world_frame: enu
* /imu_to_tf/base_frame_id: os_sensor
* /imu_to_tf/fixed_frame_id: os_sensor_stabilized
* /rosdistro: noetic
* /rosversion: 1.15.11
* /rtabmap/icp_odometry/Icp/CorrespondenceRatio: 0.01
* /rtabmap/icp_odometry/Icp/DownsamplingStep: 1
* /rtabmap/icp_odometry/Icp/Epsilon: 0.001
* /rtabmap/icp_odometry/Icp/Iterations: 30
* /rtabmap/icp_odometry/Icp/MaxCorrespondenceDistance: 1
* /rtabmap/icp_odometry/Icp/MaxTranslation: 2
* /rtabmap/icp_odometry/Icp/OutlierRatio: 0.1
* /rtabmap/icp_odometry/Icp/PointToPlane: true
* /rtabmap/icp_odometry/Icp/PointToPlaneK: 20
* /rtabmap/icp_odometry/Icp/PointToPlaneRadius: 0
* /rtabmap/icp_odometry/Icp/Strategy: true
* /rtabmap/icp_odometry/Icp/VoxelSize: 0.15
* /rtabmap/icp_odometry/Odom/ScanKeyFrameThr: 0.95
* /rtabmap/icp_odometry/Odom/Strategy: 0
* /rtabmap/icp_odometry/OdomF2M/ScanMaxSize: 20000
* /rtabmap/icp_odometry/OdomF2M/ScanSubtractRadius: 0.15
* /rtabmap/icp_odometry/expected_update_rate: 25.0
* /rtabmap/icp_odometry/frame_id: os_sensor
* /rtabmap/icp_odometry/guess_frame_id: os_sensor_stabilized
* /rtabmap/icp_odometry/odom_frame_id: odom
* /rtabmap/icp_odometry/scan_cloud_max_points: 327680
* /rtabmap/icp_odometry/wait_imu_to_init: True
* /rtabmap/point_cloud_assembler/assembling_time: 1.0
* /rtabmap/point_cloud_assembler/fixed_frame_id:
* /rtabmap/rtabmap/Grid/CellSize: 0.1
* /rtabmap/rtabmap/Grid/ClusterRadius: 1
* /rtabmap/rtabmap/Grid/FromDepth: false
* /rtabmap/rtabmap/Grid/GroundIsObstacle: true
* /rtabmap/rtabmap/Grid/RangeMax: 20
* /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.2
* /rtabmap/rtabmap/Icp/Epsilon: 0.001
* /rtabmap/rtabmap/Icp/Iterations: 10
* /rtabmap/rtabmap/Icp/MaxCorrespondenceDistance: 1
* /rtabmap/rtabmap/Icp/MaxTranslation: 3
* /rtabmap/rtabmap/Icp/PM: true
* /rtabmap/rtabmap/Icp/PMOutlierRatio: 0.7
* /rtabmap/rtabmap/Icp/PointToPlane: true
* /rtabmap/rtabmap/Icp/PointToPlaneK: 20
* /rtabmap/rtabmap/Icp/PointToPlaneRadius: 0
* /rtabmap/rtabmap/Icp/VoxelSize: 0.15
* /rtabmap/rtabmap/Kp/DetectorStrategy: 6
* /rtabmap/rtabmap/Mem/NotLinkedNodesKept: false
* /rtabmap/rtabmap/Mem/STMSize: 30
* /rtabmap/rtabmap/Optimizer/GravitySigma: 0.5
* /rtabmap/rtabmap/Optimizer/Strategy: 1
* /rtabmap/rtabmap/RGBD/AngularUpdate: 0.05
* /rtabmap/rtabmap/RGBD/LinearUpdate: 0.05
* /rtabmap/rtabmap/RGBD/LocalRadius: 2
* /rtabmap/rtabmap/RGBD/NeighborLinkRefining: false
* /rtabmap/rtabmap/RGBD/ProximityBySpace: true
* /rtabmap/rtabmap/RGBD/ProximityMaxGraphDepth: 0
* /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 1
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/Rtabmap/DetectionRate: 0
* /rtabmap/rtabmap/Vis/FeatureType: 6
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/frame_id: os_sensor
* /rtabmap/rtabmap/scan_cloud_max_points: 327680
* /rtabmap/rtabmap/subscribe_depth: False
* /rtabmap/rtabmap/subscribe_rgb: False
* /rtabmap/rtabmap/subscribe_scan_cloud: True
* /rtabmap/rtabmapviz/approx_sync: True
* /rtabmap/rtabmapviz/frame_id: os_sensor
* /rtabmap/rtabmapviz/odom_frame_id: odom
* /rtabmap/rtabmapviz/subscribe_depth: False
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_rgb: False
* /rtabmap/rtabmapviz/subscribe_rgbd: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: True
NODES
/
apriltag_ros_continuous_node (apriltag_ros/apriltag_ros_continuous_node)
imu_filter (nodelet/nodelet)
imu_nodelet_manager (nodelet/nodelet)
imu_to_tf (nodelet/nodelet)
os_sensor_to_d415_link (tf2_ros/static_transform_publisher)
rviz (rviz/rviz)
/d415/
nodelet_manager (nodelet/nodelet)
rgbd_sync (nodelet/nodelet)
/rtabmap/
icp_odometry (rtabmap_ros/icp_odometry)
point_cloud_assembler (rtabmap_ros/point_cloud_assembler)
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
ROS_MASTER_URI=http://localhost:11311
process[os_sensor_to_d415_link-1]: started with pid [141111]
process[d415/nodelet_manager-2]: started with pid [141112]
process[d415/rgbd_sync-3]: started with pid [141113]
process[imu_nodelet_manager-4]: started with pid [141115]
process[imu_filter-5]: started with pid [141120]
process[imu_to_tf-6]: started with pid [141121]
process[rtabmap/icp_odometry-7]: started with pid [141130]
process[rtabmap/rtabmap-8]: started with pid [141137]
process[rtabmap/point_cloud_assembler-9]: started with pid [141152]
process[rtabmap/rtabmapviz-10]: started with pid [141163]
process[apriltag_ros_continuous_node-11]: started with pid [141175]
process[rviz-12]: started with pid [141177]
[ INFO] [1622154587.177620239]: Initializing nodelet with 8 worker threads.
[ INFO] [1622154587.180684698]: Initializing nodelet with 8 worker threads.
[ INFO] [1622154587.263856157]: Loaded tag config: 0, size: 0.121, frame_name: TAG_0
[ INFO] [1622154587.263999153]: Loaded tag config: 1, size: 0.121, frame_name: TAG_1
[ INFO] [1622154587.264047002]: Loaded tag config: 2, size: 0.121, frame_name: TAG_2
[ INFO] [1622154587.264135387]: Loaded tag config: 137, size: 0.121, frame_name: TAG_137
[ INFO] [1622154587.264179429]: Loaded tag config: 184, size: 0.121, frame_name: TAG_184
[ INFO] [1622154587.264777894]: Loading tag bundle 'tag_bundle1'
[ INFO] [1622154587.264944093]: 0) id: 1, size: 0.062, p = [0,0,0], q = [1,0,0,0]
[ INFO] [1622154587.264997623]: 1) id: 2, size: 0.062, p = [0.077,0,0], q = [1,0,0,0]
[ INFO] [1622154587.265048378]: 2) id: 25, size: 0.062, p = [0,-0.077,0], q = [1,0,0,0]
[ INFO] [1622154587.265104252]: 3) id: 26, size: 0.062, p = [0.077,-0.077,0], q = [1,0,0,0]
[ INFO] [1622154587.265154856]: 4) id: 49, size: 0.062, p = [0,-0.154,0], q = [1,0,0,0]
[ INFO] [1622154587.265202916]: 5) id: 50, size: 0.062, p = [0.077,-0.154,0], q = [1,0,0,0]
[ WARN] [1622154587.265695503]: remove_duplicates parameter not provided. Defaulting to true
[ INFO] [1622154587.387657208]: Starting node...
[ INFO] [1622154587.413452565]: Initializing nodelet with 8 worker threads.
[ INFO] [1622154587.441852404]: Initializing nodelet with 8 worker threads.
[ INFO] [1622154587.499530779]: Odometry: frame_id = os_sensor
[ INFO] [1622154587.499559562]: Odometry: odom_frame_id = odom
[ INFO] [1622154587.499569090]: Odometry: publish_tf = true
[ INFO] [1622154587.499577265]: Odometry: wait_for_transform = true
[ INFO] [1622154587.499594227]: Odometry: wait_for_transform_duration = 0.100000
[ INFO] [1622154587.499622119]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000
[ INFO] [1622154587.499631656]: Odometry: ground_truth_frame_id =
[ INFO] [1622154587.499639251]: Odometry: ground_truth_base_frame_id = os_sensor
[ INFO] [1622154587.499646464]: Odometry: config_path =
[ INFO] [1622154587.499653477]: Odometry: publish_null_when_lost = true
[ INFO] [1622154587.499660610]: Odometry: guess_frame_id = os_sensor_stabilized
[ INFO] [1622154587.499668024]: Odometry: guess_min_translation = 0.000000
[ INFO] [1622154587.499675608]: Odometry: guess_min_rotation = 0.000000
[ INFO] [1622154587.499682892]: Odometry: guess_min_time = 0.000000
[ INFO] [1622154587.499693161]: Odometry: expected_update_rate = 25.000000 Hz
[ INFO] [1622154587.499700495]: Odometry: max_update_rate = 0.000000 Hz
[ INFO] [1622154587.499707658]: Odometry: wait_imu_to_init = true
[ INFO] [1622154587.499733125]: Odometry: stereoParams_=0 visParams_=0 icpParams_=1
[ INFO] [1622154587.500166824]: Starting node...
[ INFO] [1622154587.502766627]: Setting odometry parameter "Icp/CorrespondenceRatio"="0.01"
[ INFO] [1622154587.503039876]: Setting odometry parameter "Icp/DownsamplingStep"="1"
[ INFO] [1622154587.503303317]: Setting odometry parameter "Icp/Epsilon"="0.001"
[ INFO] [1622154587.504162157]: Setting odometry parameter "Icp/Iterations"="30"
[ INFO] [1622154587.504396875]: Setting odometry parameter "Icp/MaxCorrespondenceDistance"="1"
[ INFO] [1622154587.505268448]: Setting odometry parameter "Icp/MaxTranslation"="2"
[ INFO] [1622154587.505582333]: Setting odometry parameter "Icp/OutlierRatio"="0.1"
[ INFO] [1622154587.509742764]: Setting odometry parameter "Icp/PointToPlane"="true"
[ INFO] [1622154587.511053736]: Setting odometry parameter "Icp/PointToPlaneK"="20"
[ INFO] [1622154587.513088707]: Setting odometry parameter "Icp/PointToPlaneRadius"="0"
[ INFO] [1622154587.516132087]: Setting odometry parameter "Icp/Strategy"="true"
[ INFO] [1622154587.516565685]: Setting odometry parameter "Icp/VoxelSize"="0.15"
[ INFO] [1622154587.536243826]: /rtabmap/point_cloud_assembler: queue_size=5
[ INFO] [1622154587.536324396]: /rtabmap/point_cloud_assembler: fixed_frame_id=
[ INFO] [1622154587.536349502]: /rtabmap/point_cloud_assembler: frame_id=
[ INFO] [1622154587.536619145]: /rtabmap/point_cloud_assembler: max_clouds=0
[ INFO] [1622154587.536694024]: /rtabmap/point_cloud_assembler: assembling_time=1.000000s
[ INFO] [1622154587.536774684]: /rtabmap/point_cloud_assembler: skip_clouds=0
[ INFO] [1622154587.536834386]: /rtabmap/point_cloud_assembler: circular_buffer=false
[ INFO] [1622154587.536880441]: /rtabmap/point_cloud_assembler: wait_for_transform_duration=0.100000
[ INFO] [1622154587.536913202]: /rtabmap/point_cloud_assembler: range_min=0.000000
[ INFO] [1622154587.537002088]: /rtabmap/point_cloud_assembler: range_max=0.000000
[ INFO] [1622154587.537062230]: /rtabmap/point_cloud_assembler: voxel_size=0.000000m
[ INFO] [1622154587.537108456]: /rtabmap/point_cloud_assembler: noise_radius=0.000000m
[ INFO] [1622154587.537166715]: /rtabmap/point_cloud_assembler: noise_min_neighbors=5
[ INFO] [1622154587.569512234]:
/rtabmap/point_cloud_assembler subscribed to (exact sync):
/os_cloud_node/points,
/rtabmap/odom
[ INFO] [1622154587.573658879]: Setting odometry parameter "Odom/ScanKeyFrameThr"="0.95"
[ INFO] [1622154587.574182835]: Setting odometry parameter "Odom/Strategy"="0"
[ INFO] [1622154587.581614831]: Setting odometry parameter "OdomF2M/ScanMaxSize"="20000"
[ INFO] [1622154587.585845182]: Setting odometry parameter "OdomF2M/ScanSubtractRadius"="0.15"
[ INFO] [1622154587.612405224]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1622154587.612449616]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1622154587.612465656]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1622154587.612482468]: /rtabmap/rtabmap(maps): map_always_update = false
[ INFO] [1622154587.612498968]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
[ INFO] [1622154587.612515509]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1622154587.612531659]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1622154587.612548961]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1622154587.625916135]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1622154587.690375973]: rtabmap: frame_id = os_sensor
[ INFO] [1622154587.690419875]: rtabmap: map_frame_id = map
[ INFO] [1622154587.690446685]: rtabmap: use_action_for_goal = false
[ INFO] [1622154587.690469608]: rtabmap: tf_delay = 0.050000
[ INFO] [1622154587.690489836]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1622154587.690514802]: rtabmap: odom_sensor_sync = false
[ INFO] [1622154587.691037626]: rtabmap: gen_scan = false
[ INFO] [1622154587.691061200]: rtabmap: gen_depth = false
[ INFO] [1622154587.692605828]: rtabmapviz: Using configuration from "/home/dan/.ros/rtabmapGUI.ini"
[ INFO] [1622154587.692830987]: rtabmap: scan_cloud_max_points = 327680
[ INFO] [1622154587.810145715]: Setting RTAB-Map parameter "Grid/CellSize"="0.1"
[ INFO] [1622154587.810672315]: Setting RTAB-Map parameter "Grid/ClusterRadius"="1"
[ WARN] [1622154587.819272658]: Odometry: Parameter name changed: "Icp/PM" -> "Icp/Strategy". Please update your launch file accordingly. Value "true" is still set to the new parameter name.
[ WARN] [1622154587.821183157]: Odometry: Parameter name changed: "Icp/PMOutlierRatio" -> "Icp/OutlierRatio". Please update your launch file accordingly. Value "0.1" is still set to the new parameter name.
[ INFO] [1622154587.825448934]: Setting RTAB-Map parameter "Grid/FromDepth"="false"
[ INFO] [1622154587.826171761]: Setting RTAB-Map parameter "Grid/GroundIsObstacle"="true"
[ INFO] [1622154587.860052902]: Setting RTAB-Map parameter "Grid/RangeMax"="20"
[ WARN] [1622154587.887603038]: IcpOdometry: Transferring value 0.15 of "Icp/VoxelSize" to ros parameter "scan_voxel_size" for convenience. "Icp/VoxelSize" is set to 0.
[ WARN] [1622154587.888084284]: IcpOdometry: Transferring value 20 of "Icp/PointToPlaneK" to ros parameter "scan_normal_k" for convenience.
[ WARN] (2021-05-27 23:29:47.888) OdometryF2M.cpp:159::OdometryF2M() OdomF2M/BundleAdjustment=1 cannot be used with registration not done only with images (Reg/Strategy=1), disabling bundle adjustment.
[ INFO] [1622154587.891382379]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.2"
[ INFO] [1622154587.893635165]: Setting RTAB-Map parameter "Icp/Epsilon"="0.001"
[ INFO] [1622154587.896090329]: Setting RTAB-Map parameter "Icp/Iterations"="10"
[ INFO] [1622154587.896878518]: Setting RTAB-Map parameter "Icp/MaxCorrespondenceDistance"="1"
[ INFO] [1622154587.899196937]: odometry: Subscribing to IMU topic /os_cloud_node/imu/data
[ INFO] [1622154587.899509139]: Setting RTAB-Map parameter "Icp/MaxTranslation"="3"
[ INFO] [1622154587.904735956]: IcpOdometry: scan_cloud_max_points = 327680
[ INFO] [1622154587.904785248]: IcpOdometry: scan_downsampling_step = 1
[ INFO] [1622154587.904808862]: IcpOdometry: scan_range_min = 0.000000 m
[ INFO] [1622154587.904854457]: IcpOdometry: scan_range_max = 0.000000 m
[ INFO] [1622154587.904896625]: IcpOdometry: scan_voxel_size = 0.150000 m
[ INFO] [1622154587.904919217]: IcpOdometry: scan_normal_k = 20
[ INFO] [1622154587.904953922]: IcpOdometry: scan_normal_radius = 0.000000 m
[ INFO] [1622154587.904972286]: IcpOdometry: scan_normal_ground_up = 0.000000
[ INFO] [1622154587.911833830]: Setting RTAB-Map parameter "Icp/PointToPlane"="true"
[ INFO] [1622154587.914464220]: Setting RTAB-Map parameter "Icp/PointToPlaneK"="20"
[ INFO] [1622154587.917693977]: Setting RTAB-Map parameter "Icp/PointToPlaneRadius"="0"
[ INFO] [1622154587.920840569]: Setting RTAB-Map parameter "Icp/VoxelSize"="0.15"
[ INFO] [1622154587.937471623]: Setting RTAB-Map parameter "Kp/DetectorStrategy"="6"
[ INFO] [1622154587.975618801]: Setting RTAB-Map parameter "Mem/NotLinkedNodesKept"="false"
[ INFO] [1622154587.982652625]: Setting RTAB-Map parameter "Mem/STMSize"="30"
[ INFO] [1622154587.994437681]: Setting RTAB-Map parameter "Optimizer/GravitySigma"="0.5"
[ INFO] [1622154587.996878047]: Setting RTAB-Map parameter "Optimizer/Strategy"="1"
[ INFO] [1622154588.002149307]: Setting RTAB-Map parameter "RGBD/AngularUpdate"="0.05"
[ INFO] [1622154588.007282430]: Setting RTAB-Map parameter "RGBD/LinearUpdate"="0.05"
[ INFO] [1622154588.009863950]: Setting RTAB-Map parameter "RGBD/LocalRadius"="2"
[ INFO] [1622154588.017741285]: Setting RTAB-Map parameter "RGBD/NeighborLinkRefining"="false"
[ INFO] [1622154588.023738158]: Setting RTAB-Map parameter "RGBD/ProximityBySpace"="true"
[ INFO] [1622154588.024499616]: Setting RTAB-Map parameter "RGBD/ProximityMaxGraphDepth"="0"
[ INFO] [1622154588.026428479]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="1"
[ INFO] [1622154588.029286464]: Setting RTAB-Map parameter "Reg/Strategy"="1"
[ INFO] [1622154588.030635958]: Setting RTAB-Map parameter "Rtabmap/DetectionRate"="0"
[ INFO] [1622154588.097520584]: Setting RTAB-Map parameter "Vis/FeatureType"="6"
[ WARN] [1622154588.099310770]: IcpOdometry: "scan_cloud_max_points" is set to 327680 but input cloud is not dense and has a size of 32768 (1024x32), setting to this later size.
[ WARN] (2021-05-27 23:29:48.104) Odometry.cpp:311::process() Updated initial pose from xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000 to xyz=0.000000,0.000000,0.000000 rpy=0.029307,-0.593729,-0.040529 with IMU orientation
[ WARN] (2021-05-27 23:29:48.104) Transform.cpp:517::getTransform() No transform found for stamp 1622154588.034613! Earliest is 1622154588.087633
[ INFO] [1622154588.105445869]: Odom: ratio=0.000000, std dev=99.995000m|99.995000rad, update time=0.000692s
[ WARN] [1622154588.142757731]: Rtabmap: Parameter name changed: "Icp/PM" -> "Icp/Strategy". Please update your launch file accordingly. Value "true" is still set to the new parameter name.
[ WARN] [1622154588.144735285]: Rtabmap: Parameter name changed: "Icp/PMOutlierRatio" -> "Icp/OutlierRatio". Please update your launch file accordingly. Value "0.7" is still set to the new parameter name.
[ WARN] (2021-05-27 23:29:48.160) Transform.cpp:517::getTransform() No transform found for stamp 1622154588.084641! Earliest is 1622154588.087633
[ INFO] [1622154588.170148179]: Odom: ratio=0.973121, std dev=0.004842m|0.001531rad, update time=0.010052s
[ INFO] [1622154588.217444382]: Odom: ratio=0.962703, std dev=0.004863m|0.001538rad, update time=0.010833s
[ INFO] [1622154588.262793317]: Odom: ratio=0.976074, std dev=0.004837m|0.001530rad, update time=0.010978s
[ INFO] [1622154588.308926423]: RTAB-Map detection rate = 0.000000 Hz
[ INFO] [1622154588.309070111]: rtabmap: Deleted database "/home/dan/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
[ INFO] [1622154588.309095638]: rtabmap: Using database from "/home/dan/.ros/rtabmap.db" (0 MB).
[ INFO] [1622154588.309842339]: Odom: ratio=0.980885, std dev=0.005023m|0.001588rad, update time=0.008335s
[ WARN] (2021-05-27 23:29:48.319) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
[ WARN] (2021-05-27 23:29:48.320) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
[ WARN] (2021-05-27 23:29:48.324) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
[ INFO] [1622154588.367599251]: Odom: ratio=0.970141, std dev=0.005005m|0.001583rad, update time=0.009202s
[ INFO] [1622154588.415769702]: Odom: ratio=0.979235, std dev=0.004949m|0.001565rad, update time=0.007296s
[ INFO] [1622154588.468553228]: Odom: ratio=0.979902, std dev=0.004876m|0.001542rad, update time=0.008483s
[ WARN] (2021-05-27 23:29:48.483) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
[ INFO] [1622154588.485600156]: rtabmap: Database version = "0.20.11".
[ INFO] [1622154588.485668343]: rtabmap: SLAM mode (Mem/IncrementalMemory=true)
[ INFO] [1622154588.514029691]: /rtabmap/rtabmap: subscribe_depth = false
[ INFO] [1622154588.514119147]: /rtabmap/rtabmap: subscribe_rgb = false
[ INFO] [1622154588.514144585]: /rtabmap/rtabmap: subscribe_stereo = false
[ INFO] [1622154588.514168379]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1622154588.514198705]: /rtabmap/rtabmap: subscribe_odom_info = false
[ INFO] [1622154588.514221638]: /rtabmap/rtabmap: subscribe_user_data = false
[ INFO] [1622154588.514244942]: /rtabmap/rtabmap: subscribe_scan = false
[ INFO] [1622154588.514268265]: /rtabmap/rtabmap: subscribe_scan_cloud = true
[ INFO] [1622154588.514290546]: /rtabmap/rtabmap: subscribe_scan_descriptor = false
[ INFO] [1622154588.514314691]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1622154588.514337274]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1622154588.514425328]: Setup scan callback
[ INFO] [1622154588.515885608]: Odom: ratio=0.968427, std dev=0.005166m|0.001634rad, update time=0.010854s
[ INFO] [1622154588.522116387]:
/rtabmap/rtabmap subscribed to (approx sync):
/rtabmap/odom \
/rtabmap/assembled_cloud
[ WARN] [1622154588.522180466]: There is no image subscription, bag-of-words loop closure detection will be disabled...
[ WARN] [1622154588.522234326]: Setting Kp/MaxFeatures=-1 (bag-of-words disabled)
[ WARN] (2021-05-27 23:29:48.522) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ INFO] [1622154588.568050421]: Odom: ratio=0.972648, std dev=0.004934m|0.001560rad, update time=0.018402s
[ INFO] [1622154588.611994048]: Odom: ratio=0.979825, std dev=0.004889m|0.001546rad, update time=0.011261s
[ INFO] [1622154588.663795895]: rtabmap 0.20.11 started...
[ INFO] [1622154588.666417128]: Odom: ratio=0.975068, std dev=0.005241m|0.001657rad, update time=0.014690s
[ INFO] [1622154588.716093546]: Odom: ratio=0.979637, std dev=0.004980m|0.001575rad, update time=0.009566s
[ INFO] [1622154588.766323875]: rtabmapviz: Reading parameters from the ROS server...
[ INFO] [1622154588.767873302]: Odom: ratio=0.980937, std dev=0.004975m|0.001573rad, update time=0.009463s
[ INFO] [1622154588.825297493]: Odom: ratio=0.982571, std dev=0.005131m|0.001623rad, update time=0.022376s
[ INFO] [1622154588.864029981]: Odom: ratio=0.974781, std dev=0.004996m|0.001580rad, update time=0.009635s
[ INFO] [1622154588.923431316]: Odom: ratio=0.981481, std dev=0.004989m|0.001578rad, update time=0.019884s
[ INFO] [1622154588.964096786]: Odom: ratio=0.974303, std dev=0.004886m|0.001545rad, update time=0.009550s
[ INFO] [1622154589.012680978]: Odom: ratio=0.975490, std dev=0.004776m|0.001510rad, update time=0.008021s
[ INFO] [1622154589.062924041]: rtabmapviz: Parameters read = 349
[ INFO] [1622154589.062958716]: rtabmapviz: Parameters successfully read.
[ INFO] [1622154589.067337474]: Odom: ratio=0.975784, std dev=0.004953m|0.001566rad, update time=0.006871s
[ INFO] [1622154589.119511373]: Odom: ratio=0.975530, std dev=0.004735m|0.001497rad, update time=0.010999s
[ INFO] [1622154589.161548198]: Odom: ratio=0.979292, std dev=0.004927m|0.001558rad, update time=0.006362s
[ INFO] [1622154589.214127023]: Odom: ratio=0.973513, std dev=0.004907m|0.001552rad, update time=0.010912s
[ INFO] [1622154589.266009610]: Odom: ratio=0.972055, std dev=0.005174m|0.001636rad, update time=0.011738s
[ INFO] [1622154589.319580312]: Odom: ratio=0.973180, std dev=0.004848m|0.001533rad, update time=0.010601s
[ INFO] [1622154589.369237363]: /rtabmap/rtabmapviz: subscribe_depth = false
[ INFO] [1622154589.369267830]: /rtabmap/rtabmapviz: subscribe_rgb = false
[ INFO] [1622154589.369276216]: /rtabmap/rtabmapviz: subscribe_stereo = false
[ INFO] [1622154589.369299449]: /rtabmap/rtabmapviz: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1622154589.369306091]: /rtabmap/rtabmapviz: subscribe_odom_info = true
[ INFO] [1622154589.369322612]: /rtabmap/rtabmapviz: subscribe_user_data = false
[ INFO] [1622154589.369330216]: /rtabmap/rtabmapviz: subscribe_scan = false
[ INFO] [1622154589.369338512]: /rtabmap/rtabmapviz: subscribe_scan_cloud = true
[ INFO] [1622154589.369346076]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false
[ INFO] [1622154589.369353780]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1622154589.369362517]: /rtabmap/rtabmapviz: approx_sync = true
[ INFO] [1622154589.369406629]: Setup scan callback
[ INFO] [1622154589.370985681]: Odom: ratio=0.978190, std dev=0.004943m|0.001563rad, update time=0.008868s
[ INFO] [1622154589.372437094]:
/rtabmap/rtabmapviz subscribed to (approx sync):
/os_cloud_node/points \
/rtabmap/odom_info
[ INFO] [1622154589.372580932]: rtabmapviz started.
[ INFO] [1622154589.429056296]: Odom: ratio=0.977049, std dev=0.005176m|0.001637rad, update time=0.019174s
[ INFO] [1622154589.470694528]: Odom: ratio=0.976516, std dev=0.004929m|0.001559rad, update time=0.011734s
[ INFO] [1622154589.529006213]: Odom: ratio=0.973799, std dev=0.004909m|0.001552rad, update time=0.019547s
[ INFO] [1622154589.569012044]: Odom: ratio=0.975996, std dev=0.004875m|0.001542rad, update time=0.017478s
[ INFO] [1622154589.614063705]: Odom: ratio=0.975490, std dev=0.004911m|0.001553rad, update time=0.008343s
[ INFO] [1622154589.662077575]: Odom: ratio=0.975570, std dev=0.004987m|0.001577rad, update time=0.007600s
[ INFO] [1622154589.726001846]: Odom: ratio=0.977448, std dev=0.004948m|0.001565rad, update time=0.021868s
[ INFO] [1622154589.770482453]: Odom: ratio=0.967812, std dev=0.005020m|0.001587rad, update time=0.015083s
[ INFO] [1622154589.813416740]: Odom: ratio=0.980906, std dev=0.005032m|0.001591rad, update time=0.007112s
[ INFO] [1622154589.867796830]: Odom: ratio=0.973399, std dev=0.005039m|0.001594rad, update time=0.014096s
[ INFO] [1622154589.918483930]: Odom: ratio=0.976282, std dev=0.004974m|0.001573rad, update time=0.010948s
[ INFO] [1622154589.969405297]: Odom: ratio=0.977448, std dev=0.004874m|0.001541rad, update time=0.008710s
[FATAL] (2021-05-27 23:29:50.001) MsgConversion.cpp:2195::convertScan3dMsg() Condition (scan3dMsg.data.size() == scan3dMsg.row_step*scan3dMsg.height) not met! [data=34603008 row_step=1081344 height=1]
terminate called after throwing an instance of 'UException'
what(): [FATAL] (2021-05-27 23:29:50.001) MsgConversion.cpp:2195::convertScan3dMsg() Condition (scan3dMsg.data.size() == scan3dMsg.row_step*scan3dMsg.height) not met! [data=34603008 row_step=1081344 height=1]
[ INFO] [1622154590.020932612]: Odom: ratio=0.963348, std dev=0.005139m|0.001625rad, update time=0.009999s
[ INFO] [1622154590.065775945]: Odom: ratio=0.969730, std dev=0.005200m|0.001645rad, update time=0.006349s
[ INFO] [1622154590.123377627]: Odom: ratio=0.974512, std dev=0.005369m|0.001698rad, update time=0.018996s
[ INFO] [1622154590.161834673]: Odom: ratio=0.972885, std dev=0.005161m|0.001632rad, update time=0.008088s
[ INFO] [1622154590.212860564]: Odom: ratio=0.969598, std dev=0.005044m|0.001595rad, update time=0.011122s
[ INFO] [1622154590.264260642]: Odom: ratio=0.973956, std dev=0.005252m|0.001661rad, update time=0.010298s
[rtabmap/rtabmap-8] process has died [pid 141137, exit code -6, cmd /home/dan/catkin_ws/devel/lib/rtabmap_ros/rtabmap -d scan_cloud:=assembled_cloud imu:=/os_cloud_node/imu/data __name:=rtabmap __log:=/home/dan/.ros/log/a0365fd2-bf27-11eb-a7ca-57629d3c5fcb/rtabmap-rtabmap-8.log].
log file: /home/dan/.ros/log/a0365fd2-bf27-11eb-a7ca-57629d3c5fcb/rtabmap-rtabmap-8*.log
[ INFO] [1622154590.320630069]: Odom: ratio=0.971647, std dev=0.005206m|0.001646rad, update time=0.013118s
[ INFO] [1622154590.374222001]: Odom: ratio=0.966830, std dev=0.005115m|0.001617rad, update time=0.015954s
[ INFO] [1622154590.418617940]: Odom: ratio=0.968091, std dev=0.005109m|0.001616rad, update time=0.008908s
[ INFO] [1622154590.473458809]: Odom: ratio=0.969846, std dev=0.005160m|0.001632rad, update time=0.013763s
[ INFO] [1622154590.524588183]: Odom: ratio=0.970636, std dev=0.005149m|0.001628rad, update time=0.022895s
[ INFO] [1622154590.567025033]: Odom: ratio=0.957504, std dev=0.004959m|0.001568rad, update time=0.015617s
[ INFO] [1622154590.622036138]: Odom: ratio=0.974415, std dev=0.005340m|0.001689rad, update time=0.018483s
[ INFO] [1622154590.664231799]: Odom: ratio=0.965928, std dev=0.005125m|0.001621rad, update time=0.009049s
[ INFO] [1622154590.716262232]: Odom: ratio=0.965517, std dev=0.005022m|0.001588rad, update time=0.013089s
[ INFO] [1622154590.768551066]: Odom: ratio=0.965479, std dev=0.005302m|0.001677rad, update time=0.012671s
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-SLAM-with-loop-closure-tp7846p8094.html
Hi Mathieu,
So after much stressing and many failed test launch files i have finally got something close to my aim for loop closure. Although much is down to the new ouster launch file you recently added (so thanks for that as odometry is much more accurate and its sorted out the point cloud jumping around erratically with the ptp params you added).
Currently i have the camera able to pick up tags but I'm not sure if they should be showing up on Rtabviz or if the camera frame should be present rather than having to use rviz. Would i need set visual odometry as well?
I am sorry to ask you to have a look over my launch file as i'm sure you're very busy, but could you offer advice of where i may be going wrong or what may need to be changed.
Many thanks
Dan
<?xml version="1.0"?>
<launch>
<!--
Hand-held 3D lidar mapping example using only a Ouster GEN2 (no camera).
Prerequisities: rtabmap should be built with libpointmatcher
Example:
$ roslaunch rtabmap_ros test_ouster_gen2.launch sensor_hostname:=os-XXXXXXXXXXXX.local udp_dest:=192.168.1.XXX
$ rosrun rviz rviz -f map
RVIZ: Show TF and /rtabmap/cloud_map topics
ISSUE: You may have to reset odometry after receiving the first cloud if the map looks tilted. The problem seems
coming from the first cloud sent by os_cloud_node, which may be poorly synchronized with IMU data.
PTP mode (synchronize timestamp with host computer time)
* Install:
$ sudo apt install linuxptp httpie
$ printf "[global]\ntx_timestamp_timeout 10\n" >> ~/os.conf
* Running:
(replace "XXXXXXXXXXXX" by your ouster serial, as well as XXX by its IP address)
(replace "eth0" by the network interface used to communicate with ouster)
$ http PUT http://os-XXXXXXXXXXXX.local/api/v1/time/ptp/profile <<< '"default-relaxed"'
$ sudo ptp4l -i eth0 -m -f ~/os.conf -S
$ roslaunch rtabmap_ros test_ouster_gen2.launch sensor_hostname:=os-XXXXXXXXXXXX.local udp_dest:=192.168.1.XXX ptp:=true -->
<node pkg="tf2_ros" type="static_transform_publisher" name="os_sensor_to_d415_link" args="0 0 0 0 0 0 1 os_sensor d415_link" />
<!-- Required: -->
<arg name="sensor_hostname" default="os-122105000261.local"/>
<arg name="udp_dest" default="169.254.255.255"/>
<arg name="use_sim_time" default="false"/>
<arg name="approx_sync" default="true"/>
<arg name="frame_id" default="os_sensor"/>
<arg name="use_rtabmapviz" default="true"/>
<arg name="use_rviz" default="true"/>
<arg name="gui_cfg" default="~/.ros/rtabmap_gui.ini" />
<arg name="rviz_cfg" default="$(find rtabmap_ros)/launch/config/rgbd.rviz" />
<arg name="scan_20_hz" default="true"/>
<arg name="voxel_size" default="0.15"/> <!-- indoor: 0.1 to 0.3, outdoor: 0.3 to 0.5 -->
<arg name="assemble" default="false"/>
<arg name="ptp" default="true"/> <!-- See comments in header to start before launching the launch -->
<arg name="distortion_correction" default="false"/> <!-- Requires this pull request: https://github.com/ouster-lidar/ouster_example/pull/245 -->
<param if="$(arg use_sim_time)" name="use_sim_time" value="true"/>
<!-- Camera: -->
<arg name="use_d415" default="true"/>
<arg name="device_type_camera2" default="d415"/> <!-- Note: using regular expression. match D435, D435i, D415... -->
<arg name="serial_no_camera2" default="002422061074"/>
<arg name="camera2" default="d415"/>
<arg name="tf_prefix_camera2" default="$(arg camera2)"/>
<arg name="initial_reset" default="false"/>
<arg name="enable_fisheye" default="false"/>
<arg name="color_width" default="640"/>
<arg name="color_height" default="480"/>
<arg name="depth_width" default="640"/>
<arg name="depth_height" default="480"/>
<arg name="clip_distance" default="-2"/>
<arg name="calib_odom_file" default=""/>
<!-- RGB-D related topics -->
<arg name="camera_frame_id" default="/$(arg camera2)_color_optical_frame"/>
<arg name="rgb_topic" value="/$(arg camera2)/color/image_raw"/>
<arg name="depth_topic" value="/$(arg camera2)/aligned_depth_to_color/image_raw"/>
<arg name="camera_info_topic" value="/$(arg camera2)/color/camera_info"/>
<arg name="depth_camera_info_topic" default="$(arg camera_info_topic)" />
<arg name="rgbd_topic" default="rgbd_image" />
<group if="$(arg use_d415)" ns="$(arg camera2)">
<node pkg="nodelet" type="nodelet" name="nodelet_manager" args="manager"/>
<node pkg="nodelet" type="nodelet" name="rgbd_sync" args="load rtabmap_ros/rgbd_sync nodelet_manager">
<remap from="rgb/image" to="color/image_raw"/>
<remap from="depth/image" to="aligned_depth_to_color/image_raw"/>
<remap from="rgb/camera_info" to="color/camera_info"/>
<param name="approx_sync" type="bool" value="$(arg approx_sync)"/>
</node>
</group>
<!-- IMU orientation estimation and publish tf accordingly to os_sensor frame -->
<node pkg="nodelet" type="nodelet" name="imu_nodelet_manager" args="manager">
<remap from="imu/data_raw" to="/os_cloud_node/imu"/>
<remap from="imu/data" to="/os_cloud_node/imu/data"/>
</node>
<node pkg="nodelet" type="nodelet" name="imu_filter" args="load imu_filter_madgwick/ImuFilterNodelet imu_nodelet_manager">
<param name="use_mag" value="false"/>
<param name="world_frame" value="enu"/>
<param name="publish_tf" value="false"/>
</node>
<node pkg="nodelet" type="nodelet" name="imu_to_tf" args="load rtabmap_ros/imu_to_tf imu_nodelet_manager">
<remap from="imu/data" to="/os_cloud_node/imu/data"/>
<param name="fixed_frame_id" value="$(arg frame_id)_stabilized"/>
<param name="base_frame_id" value="$(arg frame_id)"/>
</node>
<group ns="rtabmap">
<node pkg="rtabmap_ros" type="icp_odometry" name="icp_odometry" output="screen">
<remap from="scan_cloud" to="/os_cloud_node/points"/>
<remap from="imu" to="/os_cloud_node/imu/data"/>
<param name="frame_id" type="string" value="$(arg frame_id)"/>
<param name="odom_frame_id" type="string" value="odom"/>
<param if="$(arg scan_20_hz)" name="expected_update_rate" type="double" value="25"/>
<param unless="$(arg scan_20_hz)" name="expected_update_rate" type="double" value="15"/>
<param name="scan_cloud_max_points" value="327680"/>
<param name="guess_frame_id" type="string" value="$(arg frame_id)_stabilized"/>
<param name="wait_imu_to_init" type="bool" value="true"/>
<!-- ICP parameters -->
<param name="Icp/PointToPlane" type="string" value="true"/>
<param name="Icp/Iterations" type="string" value="30"/>
<param name="Icp/VoxelSize" type="string" value="$(arg voxel_size)"/>
<param name="Icp/DownsamplingStep" type="string" value="1"/> <!-- cannot be increased with ring-like lidar -->
<param name="Icp/Epsilon" type="string" value="0.001"/>
<param name="Icp/PointToPlaneK" type="string" value="20"/>
<param name="Icp/PointToPlaneRadius" type="string" value="0"/>
<param name="Icp/MaxTranslation" type="string" value="2"/>
<param name="Icp/MaxCorrespondenceDistance" type="string" value="1"/>
<param name="Icp/Strategy" type="string" value="true"/>
<param name="Icp/OutlierRatio" type="string" value="0.1"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.01"/>
<!-- Odom parameters -->
<param name="Odom/ScanKeyFrameThr" type="string" value="0.95"/>
<param name="Odom/Strategy" type="string" value="0"/>
<param name="OdomF2M/ScanSubtractRadius" type="string" value="$(arg voxel_size)"/>
<param name="OdomF2M/ScanMaxSize" type="string" value="20000"/>
</node>
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap" output="screen" args="-d">
<param name="frame_id" type="string" value="$(arg frame_id)"/>
<param name="subscribe_depth" type="bool" value="false"/>
<param name="subscribe_rgb" type="bool" value="false"/>
<param name="subscribe_scan_cloud" type="bool" value="true"/>
<param name="approx_sync" type="bool" value="$(arg approx_sync)"/>
<param name="scan_cloud_max_points" value="327680"/>
<remap if="$(arg assemble)" from="scan_cloud" to="assembled_cloud"/>
<remap unless="$(arg assemble)" from="scan_cloud" to="/os_cloud_node/points"/>
<remap from="imu" to="/os_cloud_node/imu/data"/>
<!-- RTAB-Map's parameters -->
<param if="$(arg assemble)" name="Rtabmap/DetectionRate" type="string" value="0"/> <!-- already set 1 Hz in point_cloud_assembler -->
<param unless="$(arg assemble)" name="Rtabmap/DetectionRate" type="string" value="1"/>
<param name="RGBD/NeighborLinkRefining" type="string" value="false"/>
<param name="RGBD/ProximityBySpace" type="string" value="true"/>
<param name="RGBD/ProximityMaxGraphDepth" type="string" value="0"/>
<param name="RGBD/ProximityPathMaxNeighbors" type="string" value="1"/>
<param name="RGBD/LocalRadius" type="string" value="2"/>
<param name="RGBD/AngularUpdate" type="string" value="0.05"/>
<param name="RGBD/LinearUpdate" type="string" value="0.05"/>
<param name="Mem/NotLinkedNodesKept" type="string" value="false"/>
<param name="Mem/STMSize" type="string" value="30"/>
<!-- param name="Mem/LaserScanVoxelSize" type="string" value="0.1"/ -->
<!-- param name="Mem/LaserScanNormalK" type="string" value="10"/ -->
<!-- param name="Mem/LaserScanRadius" type="string" value="0"/ -->
<param name="Reg/Strategy" type="string" value="1"/>
<param name="Optimizer/GravitySigma" type="string" value="0.5"/>
<param name="Optimizer/Strategy" type="string" value="1"/>
<param name="Grid/CellSize" type="string" value="0.1"/>
<param name="Grid/RangeMax" type="string" value="20"/>
<param name="Grid/ClusterRadius" type="string" value="1"/>
<param name="Grid/GroundIsObstacle" type="string" value="true"/>
<param name="Grid/FromDepth" type="string" value="false"/>
<param name="Kp/DetectorStrategy" type="string" value="6"/> <!--0=SURF 1=SIFT 2=ORB 3=FAST/FREAK 4=FAST/BRIEF 5=GFTT/FREAK 6=GFTT/BRIEF(default) 7=BRISK 8=GFTT/ORB 9=KAZE-->
<param name="Vis/FeatureType" type="string" value="6"/> <!--suppress warning,want to be same as KP/detectorstrategy -->
<param name="Vis/FeatureType" type="string" value="6"/> <!--suppress warning,want to be same as KP/detectorstrategy -->
<!-- ICP parameters -->
<param name="Icp/VoxelSize" type="string" value="$(arg voxel_size)"/>
<param name="Icp/PointToPlaneK" type="string" value="20"/>
<param name="Icp/PointToPlaneRadius" type="string" value="0"/>
<param name="Icp/PointToPlane" type="string" value="true"/>
<param name="Icp/Iterations" type="string" value="10"/>
<param name="Icp/Epsilon" type="string" value="0.001"/>
<param name="Icp/MaxTranslation" type="string" value="3"/>
<param name="Icp/MaxCorrespondenceDistance" type="string" value="1"/>
<param name="Icp/Strategy" type="string" value="true"/>
<param name="Icp/PMOutlierRatio" type="string" value="0.7"/>
<param name="Icp/CorrespondenceRatio" type="string" value="0.2"/>
</node>
<node if="$(arg assemble)" pkg="rtabmap_ros" type="point_cloud_assembler" name="point_cloud_assembler" output="screen">
<remap from="cloud" to="/os_cloud_node/points"/>
<remap from="odom" to="odom"/>
<param name="assembling_time" type="double" value="1" />
<param name="fixed_frame_id" type="string" value="" />
</node>
<node if="$(arg use_rtabmapviz)" name="rtabmapviz" pkg="rtabmap_ros" type="rtabmapviz" output="screen">
<param name="frame_id" type="string" value="$(arg frame_id)"/>
<param name="odom_frame_id" type="string" value="odom"/>
<param name="subscribe_odom_info" type="bool" value="true"/>
<param name="subscribe_scan_cloud" type="bool" value="true"/>
<param name="approx_sync" type="bool" value="$(arg approx_sync)"/>
<param name="subscribe_rgb" type="bool" value="false"/>
<param name="subscribe_depth" type="bool" value="false"/>
<param name="subscribe_rgbd" type="bool" value="false"/>
<remap from="scan_cloud" to="/os_cloud_node/points"/>
</node>
</group>
<!-- Set parameters -->
<rosparam command="load" file="$(find rtabmap_ros)/launch/tests/tag_settings.yaml" ns="apriltag_ros_continuous_node" />
<rosparam command="load" file="$(find rtabmap_ros)/launch/tests/tags.yaml" ns="apriltag_ros_continuous_node" />
<node pkg="apriltag_ros" type="apriltag_ros_continuous_node" name="apriltag_ros_continuous_node" clear_params="true" output="screen">
<remap from="image_rect" to="$(arg rgb_topic)" />
<remap from="camera_info" to="$(arg camera_info_topic)" />
<param name="camera_frame" type="str" value="$(arg camera_frame_id)" />
<param name="publish_tag_detections_image" type="bool" value="true" /> <!-- default: false -->
</node>
<node if="$(arg use_rviz)" pkg="rviz" type="rviz" name="rviz" args="-d $(arg rviz_cfg)"/>
</launch>SUMMARY
========
CLEAR PARAMETERS
* /apriltag_ros_continuous_node/
PARAMETERS
* /apriltag_ros_continuous_node/camera_frame: /d415_color_optic...
* /apriltag_ros_continuous_node/publish_tag_detections_image: True
* /apriltag_ros_continuous_node/publish_tf: True
* /apriltag_ros_continuous_node/standalone_tags: [{'id': 0, 'size'...
* /apriltag_ros_continuous_node/tag_blur: 0.0
* /apriltag_ros_continuous_node/tag_border: 1
* /apriltag_ros_continuous_node/tag_bundles: [{'name': 'tag_bu...
* /apriltag_ros_continuous_node/tag_debug: 0
* /apriltag_ros_continuous_node/tag_decimate: 1.0
* /apriltag_ros_continuous_node/tag_family: tag36h11
* /apriltag_ros_continuous_node/tag_refine_decode: 0
* /apriltag_ros_continuous_node/tag_refine_edges: 1
* /apriltag_ros_continuous_node/tag_refine_pose: 0
* /apriltag_ros_continuous_node/tag_threads: 2
* /d415/rgbd_sync/approx_sync: True
* /imu_filter/publish_tf: False
* /imu_filter/use_mag: False
* /imu_filter/world_frame: enu
* /imu_to_tf/base_frame_id: os_sensor
* /imu_to_tf/fixed_frame_id: os_sensor_stabilized
* /rosdistro: noetic
* /rosversion: 1.15.11
* /rtabmap/icp_odometry/Icp/CorrespondenceRatio: 0.01
* /rtabmap/icp_odometry/Icp/DownsamplingStep: 1
* /rtabmap/icp_odometry/Icp/Epsilon: 0.001
* /rtabmap/icp_odometry/Icp/Iterations: 30
* /rtabmap/icp_odometry/Icp/MaxCorrespondenceDistance: 1
* /rtabmap/icp_odometry/Icp/MaxTranslation: 2
* /rtabmap/icp_odometry/Icp/OutlierRatio: 0.1
* /rtabmap/icp_odometry/Icp/PointToPlane: true
* /rtabmap/icp_odometry/Icp/PointToPlaneK: 20
* /rtabmap/icp_odometry/Icp/PointToPlaneRadius: 0
* /rtabmap/icp_odometry/Icp/Strategy: true
* /rtabmap/icp_odometry/Icp/VoxelSize: 0.15
* /rtabmap/icp_odometry/Odom/ScanKeyFrameThr: 0.95
* /rtabmap/icp_odometry/Odom/Strategy: 0
* /rtabmap/icp_odometry/OdomF2M/ScanMaxSize: 20000
* /rtabmap/icp_odometry/OdomF2M/ScanSubtractRadius: 0.15
* /rtabmap/icp_odometry/expected_update_rate: 25.0
* /rtabmap/icp_odometry/frame_id: os_sensor
* /rtabmap/icp_odometry/guess_frame_id: os_sensor_stabilized
* /rtabmap/icp_odometry/odom_frame_id: odom
* /rtabmap/icp_odometry/scan_cloud_max_points: 327680
* /rtabmap/icp_odometry/wait_imu_to_init: True
* /rtabmap/point_cloud_assembler/assembling_time: 1.0
* /rtabmap/point_cloud_assembler/fixed_frame_id:
* /rtabmap/rtabmap/Grid/CellSize: 0.1
* /rtabmap/rtabmap/Grid/ClusterRadius: 1
* /rtabmap/rtabmap/Grid/FromDepth: false
* /rtabmap/rtabmap/Grid/GroundIsObstacle: true
* /rtabmap/rtabmap/Grid/RangeMax: 20
* /rtabmap/rtabmap/Icp/CorrespondenceRatio: 0.2
* /rtabmap/rtabmap/Icp/Epsilon: 0.001
* /rtabmap/rtabmap/Icp/Iterations: 10
* /rtabmap/rtabmap/Icp/MaxCorrespondenceDistance: 1
* /rtabmap/rtabmap/Icp/MaxTranslation: 3
* /rtabmap/rtabmap/Icp/PM: true
* /rtabmap/rtabmap/Icp/PMOutlierRatio: 0.7
* /rtabmap/rtabmap/Icp/PointToPlane: true
* /rtabmap/rtabmap/Icp/PointToPlaneK: 20
* /rtabmap/rtabmap/Icp/PointToPlaneRadius: 0
* /rtabmap/rtabmap/Icp/VoxelSize: 0.15
* /rtabmap/rtabmap/Kp/DetectorStrategy: 6
* /rtabmap/rtabmap/Mem/NotLinkedNodesKept: false
* /rtabmap/rtabmap/Mem/STMSize: 30
* /rtabmap/rtabmap/Optimizer/GravitySigma: 0.5
* /rtabmap/rtabmap/Optimizer/Strategy: 1
* /rtabmap/rtabmap/RGBD/AngularUpdate: 0.05
* /rtabmap/rtabmap/RGBD/LinearUpdate: 0.05
* /rtabmap/rtabmap/RGBD/LocalRadius: 2
* /rtabmap/rtabmap/RGBD/NeighborLinkRefining: false
* /rtabmap/rtabmap/RGBD/ProximityBySpace: true
* /rtabmap/rtabmap/RGBD/ProximityMaxGraphDepth: 0
* /rtabmap/rtabmap/RGBD/ProximityPathMaxNeighbors: 1
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/Rtabmap/DetectionRate: 0
* /rtabmap/rtabmap/Vis/FeatureType: 6
* /rtabmap/rtabmap/approx_sync: True
* /rtabmap/rtabmap/frame_id: os_sensor
* /rtabmap/rtabmap/scan_cloud_max_points: 327680
* /rtabmap/rtabmap/subscribe_depth: False
* /rtabmap/rtabmap/subscribe_rgb: False
* /rtabmap/rtabmap/subscribe_scan_cloud: True
* /rtabmap/rtabmapviz/approx_sync: True
* /rtabmap/rtabmapviz/frame_id: os_sensor
* /rtabmap/rtabmapviz/odom_frame_id: odom
* /rtabmap/rtabmapviz/subscribe_depth: False
* /rtabmap/rtabmapviz/subscribe_odom_info: True
* /rtabmap/rtabmapviz/subscribe_rgb: False
* /rtabmap/rtabmapviz/subscribe_rgbd: False
* /rtabmap/rtabmapviz/subscribe_scan_cloud: True
NODES
/
apriltag_ros_continuous_node (apriltag_ros/apriltag_ros_continuous_node)
imu_filter (nodelet/nodelet)
imu_nodelet_manager (nodelet/nodelet)
imu_to_tf (nodelet/nodelet)
os_sensor_to_d415_link (tf2_ros/static_transform_publisher)
rviz (rviz/rviz)
/d415/
nodelet_manager (nodelet/nodelet)
rgbd_sync (nodelet/nodelet)
/rtabmap/
icp_odometry (rtabmap_ros/icp_odometry)
point_cloud_assembler (rtabmap_ros/point_cloud_assembler)
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
ROS_MASTER_URI=http://localhost:11311
process[os_sensor_to_d415_link-1]: started with pid [141111]
process[d415/nodelet_manager-2]: started with pid [141112]
process[d415/rgbd_sync-3]: started with pid [141113]
process[imu_nodelet_manager-4]: started with pid [141115]
process[imu_filter-5]: started with pid [141120]
process[imu_to_tf-6]: started with pid [141121]
process[rtabmap/icp_odometry-7]: started with pid [141130]
process[rtabmap/rtabmap-8]: started with pid [141137]
process[rtabmap/point_cloud_assembler-9]: started with pid [141152]
process[rtabmap/rtabmapviz-10]: started with pid [141163]
process[apriltag_ros_continuous_node-11]: started with pid [141175]
process[rviz-12]: started with pid [141177]
[ INFO] [1622154587.177620239]: Initializing nodelet with 8 worker threads.
[ INFO] [1622154587.180684698]: Initializing nodelet with 8 worker threads.
[ INFO] [1622154587.263856157]: Loaded tag config: 0, size: 0.121, frame_name: TAG_0
[ INFO] [1622154587.263999153]: Loaded tag config: 1, size: 0.121, frame_name: TAG_1
[ INFO] [1622154587.264047002]: Loaded tag config: 2, size: 0.121, frame_name: TAG_2
[ INFO] [1622154587.264135387]: Loaded tag config: 137, size: 0.121, frame_name: TAG_137
[ INFO] [1622154587.264179429]: Loaded tag config: 184, size: 0.121, frame_name: TAG_184
[ INFO] [1622154587.264777894]: Loading tag bundle 'tag_bundle1'
[ INFO] [1622154587.264944093]: 0) id: 1, size: 0.062, p = [0,0,0], q = [1,0,0,0]
[ INFO] [1622154587.264997623]: 1) id: 2, size: 0.062, p = [0.077,0,0], q = [1,0,0,0]
[ INFO] [1622154587.265048378]: 2) id: 25, size: 0.062, p = [0,-0.077,0], q = [1,0,0,0]
[ INFO] [1622154587.265104252]: 3) id: 26, size: 0.062, p = [0.077,-0.077,0], q = [1,0,0,0]
[ INFO] [1622154587.265154856]: 4) id: 49, size: 0.062, p = [0,-0.154,0], q = [1,0,0,0]
[ INFO] [1622154587.265202916]: 5) id: 50, size: 0.062, p = [0.077,-0.154,0], q = [1,0,0,0]
[ WARN] [1622154587.265695503]: remove_duplicates parameter not provided. Defaulting to true
[ INFO] [1622154587.387657208]: Starting node...
[ INFO] [1622154587.413452565]: Initializing nodelet with 8 worker threads.
[ INFO] [1622154587.441852404]: Initializing nodelet with 8 worker threads.
[ INFO] [1622154587.499530779]: Odometry: frame_id = os_sensor
[ INFO] [1622154587.499559562]: Odometry: odom_frame_id = odom
[ INFO] [1622154587.499569090]: Odometry: publish_tf = true
[ INFO] [1622154587.499577265]: Odometry: wait_for_transform = true
[ INFO] [1622154587.499594227]: Odometry: wait_for_transform_duration = 0.100000
[ INFO] [1622154587.499622119]: Odometry: initial_pose = xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000
[ INFO] [1622154587.499631656]: Odometry: ground_truth_frame_id =
[ INFO] [1622154587.499639251]: Odometry: ground_truth_base_frame_id = os_sensor
[ INFO] [1622154587.499646464]: Odometry: config_path =
[ INFO] [1622154587.499653477]: Odometry: publish_null_when_lost = true
[ INFO] [1622154587.499660610]: Odometry: guess_frame_id = os_sensor_stabilized
[ INFO] [1622154587.499668024]: Odometry: guess_min_translation = 0.000000
[ INFO] [1622154587.499675608]: Odometry: guess_min_rotation = 0.000000
[ INFO] [1622154587.499682892]: Odometry: guess_min_time = 0.000000
[ INFO] [1622154587.499693161]: Odometry: expected_update_rate = 25.000000 Hz
[ INFO] [1622154587.499700495]: Odometry: max_update_rate = 0.000000 Hz
[ INFO] [1622154587.499707658]: Odometry: wait_imu_to_init = true
[ INFO] [1622154587.499733125]: Odometry: stereoParams_=0 visParams_=0 icpParams_=1
[ INFO] [1622154587.500166824]: Starting node...
[ INFO] [1622154587.502766627]: Setting odometry parameter "Icp/CorrespondenceRatio"="0.01"
[ INFO] [1622154587.503039876]: Setting odometry parameter "Icp/DownsamplingStep"="1"
[ INFO] [1622154587.503303317]: Setting odometry parameter "Icp/Epsilon"="0.001"
[ INFO] [1622154587.504162157]: Setting odometry parameter "Icp/Iterations"="30"
[ INFO] [1622154587.504396875]: Setting odometry parameter "Icp/MaxCorrespondenceDistance"="1"
[ INFO] [1622154587.505268448]: Setting odometry parameter "Icp/MaxTranslation"="2"
[ INFO] [1622154587.505582333]: Setting odometry parameter "Icp/OutlierRatio"="0.1"
[ INFO] [1622154587.509742764]: Setting odometry parameter "Icp/PointToPlane"="true"
[ INFO] [1622154587.511053736]: Setting odometry parameter "Icp/PointToPlaneK"="20"
[ INFO] [1622154587.513088707]: Setting odometry parameter "Icp/PointToPlaneRadius"="0"
[ INFO] [1622154587.516132087]: Setting odometry parameter "Icp/Strategy"="true"
[ INFO] [1622154587.516565685]: Setting odometry parameter "Icp/VoxelSize"="0.15"
[ INFO] [1622154587.536243826]: /rtabmap/point_cloud_assembler: queue_size=5
[ INFO] [1622154587.536324396]: /rtabmap/point_cloud_assembler: fixed_frame_id=
[ INFO] [1622154587.536349502]: /rtabmap/point_cloud_assembler: frame_id=
[ INFO] [1622154587.536619145]: /rtabmap/point_cloud_assembler: max_clouds=0
[ INFO] [1622154587.536694024]: /rtabmap/point_cloud_assembler: assembling_time=1.000000s
[ INFO] [1622154587.536774684]: /rtabmap/point_cloud_assembler: skip_clouds=0
[ INFO] [1622154587.536834386]: /rtabmap/point_cloud_assembler: circular_buffer=false
[ INFO] [1622154587.536880441]: /rtabmap/point_cloud_assembler: wait_for_transform_duration=0.100000
[ INFO] [1622154587.536913202]: /rtabmap/point_cloud_assembler: range_min=0.000000
[ INFO] [1622154587.537002088]: /rtabmap/point_cloud_assembler: range_max=0.000000
[ INFO] [1622154587.537062230]: /rtabmap/point_cloud_assembler: voxel_size=0.000000m
[ INFO] [1622154587.537108456]: /rtabmap/point_cloud_assembler: noise_radius=0.000000m
[ INFO] [1622154587.537166715]: /rtabmap/point_cloud_assembler: noise_min_neighbors=5
[ INFO] [1622154587.569512234]:
/rtabmap/point_cloud_assembler subscribed to (exact sync):
/os_cloud_node/points,
/rtabmap/odom
[ INFO] [1622154587.573658879]: Setting odometry parameter "Odom/ScanKeyFrameThr"="0.95"
[ INFO] [1622154587.574182835]: Setting odometry parameter "Odom/Strategy"="0"
[ INFO] [1622154587.581614831]: Setting odometry parameter "OdomF2M/ScanMaxSize"="20000"
[ INFO] [1622154587.585845182]: Setting odometry parameter "OdomF2M/ScanSubtractRadius"="0.15"
[ INFO] [1622154587.612405224]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1622154587.612449616]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1622154587.612465656]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1622154587.612482468]: /rtabmap/rtabmap(maps): map_always_update = false
[ INFO] [1622154587.612498968]: /rtabmap/rtabmap(maps): map_empty_ray_tracing = true
[ INFO] [1622154587.612515509]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1622154587.612531659]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1622154587.612548961]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1622154587.625916135]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1622154587.690375973]: rtabmap: frame_id = os_sensor
[ INFO] [1622154587.690419875]: rtabmap: map_frame_id = map
[ INFO] [1622154587.690446685]: rtabmap: use_action_for_goal = false
[ INFO] [1622154587.690469608]: rtabmap: tf_delay = 0.050000
[ INFO] [1622154587.690489836]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1622154587.690514802]: rtabmap: odom_sensor_sync = false
[ INFO] [1622154587.691037626]: rtabmap: gen_scan = false
[ INFO] [1622154587.691061200]: rtabmap: gen_depth = false
[ INFO] [1622154587.692605828]: rtabmapviz: Using configuration from "/home/dan/.ros/rtabmapGUI.ini"
[ INFO] [1622154587.692830987]: rtabmap: scan_cloud_max_points = 327680
[ INFO] [1622154587.810145715]: Setting RTAB-Map parameter "Grid/CellSize"="0.1"
[ INFO] [1622154587.810672315]: Setting RTAB-Map parameter "Grid/ClusterRadius"="1"
[ WARN] [1622154587.819272658]: Odometry: Parameter name changed: "Icp/PM" -> "Icp/Strategy". Please update your launch file accordingly. Value "true" is still set to the new parameter name.
[ WARN] [1622154587.821183157]: Odometry: Parameter name changed: "Icp/PMOutlierRatio" -> "Icp/OutlierRatio". Please update your launch file accordingly. Value "0.1" is still set to the new parameter name.
[ INFO] [1622154587.825448934]: Setting RTAB-Map parameter "Grid/FromDepth"="false"
[ INFO] [1622154587.826171761]: Setting RTAB-Map parameter "Grid/GroundIsObstacle"="true"
[ INFO] [1622154587.860052902]: Setting RTAB-Map parameter "Grid/RangeMax"="20"
[ WARN] [1622154587.887603038]: IcpOdometry: Transferring value 0.15 of "Icp/VoxelSize" to ros parameter "scan_voxel_size" for convenience. "Icp/VoxelSize" is set to 0.
[ WARN] [1622154587.888084284]: IcpOdometry: Transferring value 20 of "Icp/PointToPlaneK" to ros parameter "scan_normal_k" for convenience.
[ WARN] (2021-05-27 23:29:47.888) OdometryF2M.cpp:159::OdometryF2M() OdomF2M/BundleAdjustment=1 cannot be used with registration not done only with images (Reg/Strategy=1), disabling bundle adjustment.
[ INFO] [1622154587.891382379]: Setting RTAB-Map parameter "Icp/CorrespondenceRatio"="0.2"
[ INFO] [1622154587.893635165]: Setting RTAB-Map parameter "Icp/Epsilon"="0.001"
[ INFO] [1622154587.896090329]: Setting RTAB-Map parameter "Icp/Iterations"="10"
[ INFO] [1622154587.896878518]: Setting RTAB-Map parameter "Icp/MaxCorrespondenceDistance"="1"
[ INFO] [1622154587.899196937]: odometry: Subscribing to IMU topic /os_cloud_node/imu/data
[ INFO] [1622154587.899509139]: Setting RTAB-Map parameter "Icp/MaxTranslation"="3"
[ INFO] [1622154587.904735956]: IcpOdometry: scan_cloud_max_points = 327680
[ INFO] [1622154587.904785248]: IcpOdometry: scan_downsampling_step = 1
[ INFO] [1622154587.904808862]: IcpOdometry: scan_range_min = 0.000000 m
[ INFO] [1622154587.904854457]: IcpOdometry: scan_range_max = 0.000000 m
[ INFO] [1622154587.904896625]: IcpOdometry: scan_voxel_size = 0.150000 m
[ INFO] [1622154587.904919217]: IcpOdometry: scan_normal_k = 20
[ INFO] [1622154587.904953922]: IcpOdometry: scan_normal_radius = 0.000000 m
[ INFO] [1622154587.904972286]: IcpOdometry: scan_normal_ground_up = 0.000000
[ INFO] [1622154587.911833830]: Setting RTAB-Map parameter "Icp/PointToPlane"="true"
[ INFO] [1622154587.914464220]: Setting RTAB-Map parameter "Icp/PointToPlaneK"="20"
[ INFO] [1622154587.917693977]: Setting RTAB-Map parameter "Icp/PointToPlaneRadius"="0"
[ INFO] [1622154587.920840569]: Setting RTAB-Map parameter "Icp/VoxelSize"="0.15"
[ INFO] [1622154587.937471623]: Setting RTAB-Map parameter "Kp/DetectorStrategy"="6"
[ INFO] [1622154587.975618801]: Setting RTAB-Map parameter "Mem/NotLinkedNodesKept"="false"
[ INFO] [1622154587.982652625]: Setting RTAB-Map parameter "Mem/STMSize"="30"
[ INFO] [1622154587.994437681]: Setting RTAB-Map parameter "Optimizer/GravitySigma"="0.5"
[ INFO] [1622154587.996878047]: Setting RTAB-Map parameter "Optimizer/Strategy"="1"
[ INFO] [1622154588.002149307]: Setting RTAB-Map parameter "RGBD/AngularUpdate"="0.05"
[ INFO] [1622154588.007282430]: Setting RTAB-Map parameter "RGBD/LinearUpdate"="0.05"
[ INFO] [1622154588.009863950]: Setting RTAB-Map parameter "RGBD/LocalRadius"="2"
[ INFO] [1622154588.017741285]: Setting RTAB-Map parameter "RGBD/NeighborLinkRefining"="false"
[ INFO] [1622154588.023738158]: Setting RTAB-Map parameter "RGBD/ProximityBySpace"="true"
[ INFO] [1622154588.024499616]: Setting RTAB-Map parameter "RGBD/ProximityMaxGraphDepth"="0"
[ INFO] [1622154588.026428479]: Setting RTAB-Map parameter "RGBD/ProximityPathMaxNeighbors"="1"
[ INFO] [1622154588.029286464]: Setting RTAB-Map parameter "Reg/Strategy"="1"
[ INFO] [1622154588.030635958]: Setting RTAB-Map parameter "Rtabmap/DetectionRate"="0"
[ INFO] [1622154588.097520584]: Setting RTAB-Map parameter "Vis/FeatureType"="6"
[ WARN] [1622154588.099310770]: IcpOdometry: "scan_cloud_max_points" is set to 327680 but input cloud is not dense and has a size of 32768 (1024x32), setting to this later size.
[ WARN] (2021-05-27 23:29:48.104) Odometry.cpp:311::process() Updated initial pose from xyz=0.000000,0.000000,0.000000 rpy=0.000000,-0.000000,0.000000 to xyz=0.000000,0.000000,0.000000 rpy=0.029307,-0.593729,-0.040529 with IMU orientation
[ WARN] (2021-05-27 23:29:48.104) Transform.cpp:517::getTransform() No transform found for stamp 1622154588.034613! Earliest is 1622154588.087633
[ INFO] [1622154588.105445869]: Odom: ratio=0.000000, std dev=99.995000m|99.995000rad, update time=0.000692s
[ WARN] [1622154588.142757731]: Rtabmap: Parameter name changed: "Icp/PM" -> "Icp/Strategy". Please update your launch file accordingly. Value "true" is still set to the new parameter name.
[ WARN] [1622154588.144735285]: Rtabmap: Parameter name changed: "Icp/PMOutlierRatio" -> "Icp/OutlierRatio". Please update your launch file accordingly. Value "0.7" is still set to the new parameter name.
[ WARN] (2021-05-27 23:29:48.160) Transform.cpp:517::getTransform() No transform found for stamp 1622154588.084641! Earliest is 1622154588.087633
[ INFO] [1622154588.170148179]: Odom: ratio=0.973121, std dev=0.004842m|0.001531rad, update time=0.010052s
[ INFO] [1622154588.217444382]: Odom: ratio=0.962703, std dev=0.004863m|0.001538rad, update time=0.010833s
[ INFO] [1622154588.262793317]: Odom: ratio=0.976074, std dev=0.004837m|0.001530rad, update time=0.010978s
[ INFO] [1622154588.308926423]: RTAB-Map detection rate = 0.000000 Hz
[ INFO] [1622154588.309070111]: rtabmap: Deleted database "/home/dan/.ros/rtabmap.db" (--delete_db_on_start or -d are set).
[ INFO] [1622154588.309095638]: rtabmap: Using database from "/home/dan/.ros/rtabmap.db" (0 MB).
[ INFO] [1622154588.309842339]: Odom: ratio=0.980885, std dev=0.005023m|0.001588rad, update time=0.008335s
[ WARN] (2021-05-27 23:29:48.319) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
[ WARN] (2021-05-27 23:29:48.320) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
[ WARN] (2021-05-27 23:29:48.324) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
[ INFO] [1622154588.367599251]: Odom: ratio=0.970141, std dev=0.005005m|0.001583rad, update time=0.009202s
[ INFO] [1622154588.415769702]: Odom: ratio=0.979235, std dev=0.004949m|0.001565rad, update time=0.007296s
[ INFO] [1622154588.468553228]: Odom: ratio=0.979902, std dev=0.004876m|0.001542rad, update time=0.008483s
[ WARN] (2021-05-27 23:29:48.483) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
[ INFO] [1622154588.485600156]: rtabmap: Database version = "0.20.11".
[ INFO] [1622154588.485668343]: rtabmap: SLAM mode (Mem/IncrementalMemory=true)
[ INFO] [1622154588.514029691]: /rtabmap/rtabmap: subscribe_depth = false
[ INFO] [1622154588.514119147]: /rtabmap/rtabmap: subscribe_rgb = false
[ INFO] [1622154588.514144585]: /rtabmap/rtabmap: subscribe_stereo = false
[ INFO] [1622154588.514168379]: /rtabmap/rtabmap: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1622154588.514198705]: /rtabmap/rtabmap: subscribe_odom_info = false
[ INFO] [1622154588.514221638]: /rtabmap/rtabmap: subscribe_user_data = false
[ INFO] [1622154588.514244942]: /rtabmap/rtabmap: subscribe_scan = false
[ INFO] [1622154588.514268265]: /rtabmap/rtabmap: subscribe_scan_cloud = true
[ INFO] [1622154588.514290546]: /rtabmap/rtabmap: subscribe_scan_descriptor = false
[ INFO] [1622154588.514314691]: /rtabmap/rtabmap: queue_size = 10
[ INFO] [1622154588.514337274]: /rtabmap/rtabmap: approx_sync = true
[ INFO] [1622154588.514425328]: Setup scan callback
[ INFO] [1622154588.515885608]: Odom: ratio=0.968427, std dev=0.005166m|0.001634rad, update time=0.010854s
[ INFO] [1622154588.522116387]:
/rtabmap/rtabmap subscribed to (approx sync):
/rtabmap/odom \
/rtabmap/assembled_cloud
[ WARN] [1622154588.522180466]: There is no image subscription, bag-of-words loop closure detection will be disabled...
[ WARN] [1622154588.522234326]: Setting Kp/MaxFeatures=-1 (bag-of-words disabled)
[ WARN] (2021-05-27 23:29:48.522) Features2d.cpp:561::create() BRIEF, FREAK and DAISY features cannot be used because OpenCV was not built with xfeatures2d module. GFTT/ORB is used instead.
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
libpng warning: iCCP: known incorrect sRGB profile
[ INFO] [1622154588.568050421]: Odom: ratio=0.972648, std dev=0.004934m|0.001560rad, update time=0.018402s
[ INFO] [1622154588.611994048]: Odom: ratio=0.979825, std dev=0.004889m|0.001546rad, update time=0.011261s
[ INFO] [1622154588.663795895]: rtabmap 0.20.11 started...
[ INFO] [1622154588.666417128]: Odom: ratio=0.975068, std dev=0.005241m|0.001657rad, update time=0.014690s
[ INFO] [1622154588.716093546]: Odom: ratio=0.979637, std dev=0.004980m|0.001575rad, update time=0.009566s
[ INFO] [1622154588.766323875]: rtabmapviz: Reading parameters from the ROS server...
[ INFO] [1622154588.767873302]: Odom: ratio=0.980937, std dev=0.004975m|0.001573rad, update time=0.009463s
[ INFO] [1622154588.825297493]: Odom: ratio=0.982571, std dev=0.005131m|0.001623rad, update time=0.022376s
[ INFO] [1622154588.864029981]: Odom: ratio=0.974781, std dev=0.004996m|0.001580rad, update time=0.009635s
[ INFO] [1622154588.923431316]: Odom: ratio=0.981481, std dev=0.004989m|0.001578rad, update time=0.019884s
[ INFO] [1622154588.964096786]: Odom: ratio=0.974303, std dev=0.004886m|0.001545rad, update time=0.009550s
[ INFO] [1622154589.012680978]: Odom: ratio=0.975490, std dev=0.004776m|0.001510rad, update time=0.008021s
[ INFO] [1622154589.062924041]: rtabmapviz: Parameters read = 349
[ INFO] [1622154589.062958716]: rtabmapviz: Parameters successfully read.
[ INFO] [1622154589.067337474]: Odom: ratio=0.975784, std dev=0.004953m|0.001566rad, update time=0.006871s
[ INFO] [1622154589.119511373]: Odom: ratio=0.975530, std dev=0.004735m|0.001497rad, update time=0.010999s
[ INFO] [1622154589.161548198]: Odom: ratio=0.979292, std dev=0.004927m|0.001558rad, update time=0.006362s
[ INFO] [1622154589.214127023]: Odom: ratio=0.973513, std dev=0.004907m|0.001552rad, update time=0.010912s
[ INFO] [1622154589.266009610]: Odom: ratio=0.972055, std dev=0.005174m|0.001636rad, update time=0.011738s
[ INFO] [1622154589.319580312]: Odom: ratio=0.973180, std dev=0.004848m|0.001533rad, update time=0.010601s
[ INFO] [1622154589.369237363]: /rtabmap/rtabmapviz: subscribe_depth = false
[ INFO] [1622154589.369267830]: /rtabmap/rtabmapviz: subscribe_rgb = false
[ INFO] [1622154589.369276216]: /rtabmap/rtabmapviz: subscribe_stereo = false
[ INFO] [1622154589.369299449]: /rtabmap/rtabmapviz: subscribe_rgbd = false (rgbd_cameras=1)
[ INFO] [1622154589.369306091]: /rtabmap/rtabmapviz: subscribe_odom_info = true
[ INFO] [1622154589.369322612]: /rtabmap/rtabmapviz: subscribe_user_data = false
[ INFO] [1622154589.369330216]: /rtabmap/rtabmapviz: subscribe_scan = false
[ INFO] [1622154589.369338512]: /rtabmap/rtabmapviz: subscribe_scan_cloud = true
[ INFO] [1622154589.369346076]: /rtabmap/rtabmapviz: subscribe_scan_descriptor = false
[ INFO] [1622154589.369353780]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1622154589.369362517]: /rtabmap/rtabmapviz: approx_sync = true
[ INFO] [1622154589.369406629]: Setup scan callback
[ INFO] [1622154589.370985681]: Odom: ratio=0.978190, std dev=0.004943m|0.001563rad, update time=0.008868s
[ INFO] [1622154589.372437094]:
/rtabmap/rtabmapviz subscribed to (approx sync):
/os_cloud_node/points \
/rtabmap/odom_info
[ INFO] [1622154589.372580932]: rtabmapviz started.
[ INFO] [1622154589.429056296]: Odom: ratio=0.977049, std dev=0.005176m|0.001637rad, update time=0.019174s
[ INFO] [1622154589.470694528]: Odom: ratio=0.976516, std dev=0.004929m|0.001559rad, update time=0.011734s
[ INFO] [1622154589.529006213]: Odom: ratio=0.973799, std dev=0.004909m|0.001552rad, update time=0.019547s
[ INFO] [1622154589.569012044]: Odom: ratio=0.975996, std dev=0.004875m|0.001542rad, update time=0.017478s
[ INFO] [1622154589.614063705]: Odom: ratio=0.975490, std dev=0.004911m|0.001553rad, update time=0.008343s
[ INFO] [1622154589.662077575]: Odom: ratio=0.975570, std dev=0.004987m|0.001577rad, update time=0.007600s
[ INFO] [1622154589.726001846]: Odom: ratio=0.977448, std dev=0.004948m|0.001565rad, update time=0.021868s
[ INFO] [1622154589.770482453]: Odom: ratio=0.967812, std dev=0.005020m|0.001587rad, update time=0.015083s
[ INFO] [1622154589.813416740]: Odom: ratio=0.980906, std dev=0.005032m|0.001591rad, update time=0.007112s
[ INFO] [1622154589.867796830]: Odom: ratio=0.973399, std dev=0.005039m|0.001594rad, update time=0.014096s
[ INFO] [1622154589.918483930]: Odom: ratio=0.976282, std dev=0.004974m|0.001573rad, update time=0.010948s
[ INFO] [1622154589.969405297]: Odom: ratio=0.977448, std dev=0.004874m|0.001541rad, update time=0.008710s
[FATAL] (2021-05-27 23:29:50.001) MsgConversion.cpp:2195::convertScan3dMsg() Condition (scan3dMsg.data.size() == scan3dMsg.row_step*scan3dMsg.height) not met! [data=34603008 row_step=1081344 height=1]
terminate called after throwing an instance of 'UException'
what(): [FATAL] (2021-05-27 23:29:50.001) MsgConversion.cpp:2195::convertScan3dMsg() Condition (scan3dMsg.data.size() == scan3dMsg.row_step*scan3dMsg.height) not met! [data=34603008 row_step=1081344 height=1]
[ INFO] [1622154590.020932612]: Odom: ratio=0.963348, std dev=0.005139m|0.001625rad, update time=0.009999s
[ INFO] [1622154590.065775945]: Odom: ratio=0.969730, std dev=0.005200m|0.001645rad, update time=0.006349s
[ INFO] [1622154590.123377627]: Odom: ratio=0.974512, std dev=0.005369m|0.001698rad, update time=0.018996s
[ INFO] [1622154590.161834673]: Odom: ratio=0.972885, std dev=0.005161m|0.001632rad, update time=0.008088s
[ INFO] [1622154590.212860564]: Odom: ratio=0.969598, std dev=0.005044m|0.001595rad, update time=0.011122s
[ INFO] [1622154590.264260642]: Odom: ratio=0.973956, std dev=0.005252m|0.001661rad, update time=0.010298s
[rtabmap/rtabmap-8] process has died [pid 141137, exit code -6, cmd /home/dan/catkin_ws/devel/lib/rtabmap_ros/rtabmap -d scan_cloud:=assembled_cloud imu:=/os_cloud_node/imu/data __name:=rtabmap __log:=/home/dan/.ros/log/a0365fd2-bf27-11eb-a7ca-57629d3c5fcb/rtabmap-rtabmap-8.log].
log file: /home/dan/.ros/log/a0365fd2-bf27-11eb-a7ca-57629d3c5fcb/rtabmap-rtabmap-8*.log
[ INFO] [1622154590.320630069]: Odom: ratio=0.971647, std dev=0.005206m|0.001646rad, update time=0.013118s
[ INFO] [1622154590.374222001]: Odom: ratio=0.966830, std dev=0.005115m|0.001617rad, update time=0.015954s
[ INFO] [1622154590.418617940]: Odom: ratio=0.968091, std dev=0.005109m|0.001616rad, update time=0.008908s
[ INFO] [1622154590.473458809]: Odom: ratio=0.969846, std dev=0.005160m|0.001632rad, update time=0.013763s
[ INFO] [1622154590.524588183]: Odom: ratio=0.970636, std dev=0.005149m|0.001628rad, update time=0.022895s
[ INFO] [1622154590.567025033]: Odom: ratio=0.957504, std dev=0.004959m|0.001568rad, update time=0.015617s
[ INFO] [1622154590.622036138]: Odom: ratio=0.974415, std dev=0.005340m|0.001689rad, update time=0.018483s
[ INFO] [1622154590.664231799]: Odom: ratio=0.965928, std dev=0.005125m|0.001621rad, update time=0.009049s
[ INFO] [1622154590.716262232]: Odom: ratio=0.965517, std dev=0.005022m|0.001588rad, update time=0.013089s
[ INFO] [1622154590.768551066]: Odom: ratio=0.965479, std dev=0.005302m|0.001677rad, update time=0.012671s
| Free forum by Nabble | Edit this page |