Re: Lidar SLAM with loop closure
Posted by denzle on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-SLAM-with-loop-closure-tp7846p8137.html
Many thanks for your reply.
The second frame is indeed a tag it is somewhat off as i haven't properly mounted the camera and lidar together yet whilst i try and get everything working properly.
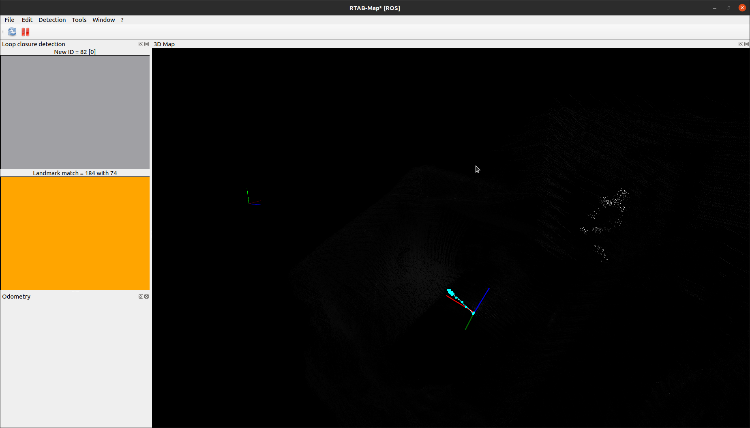
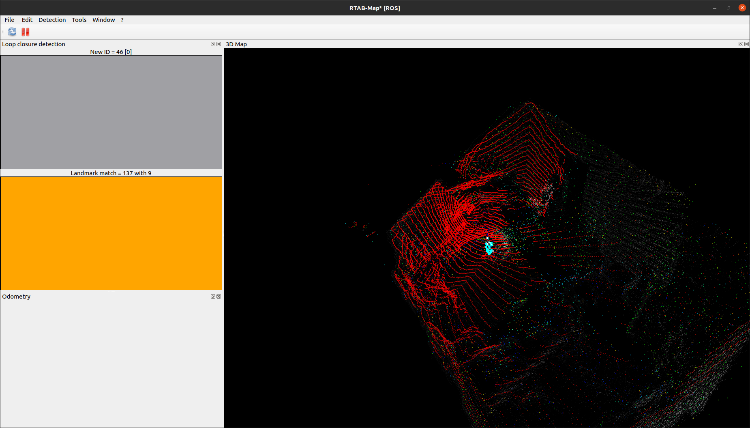
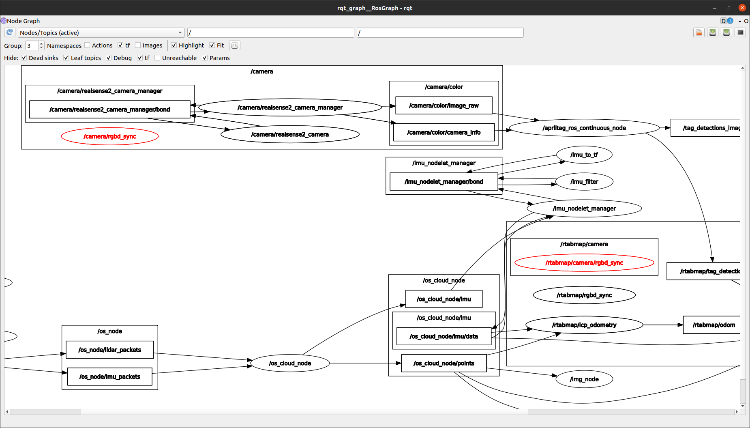
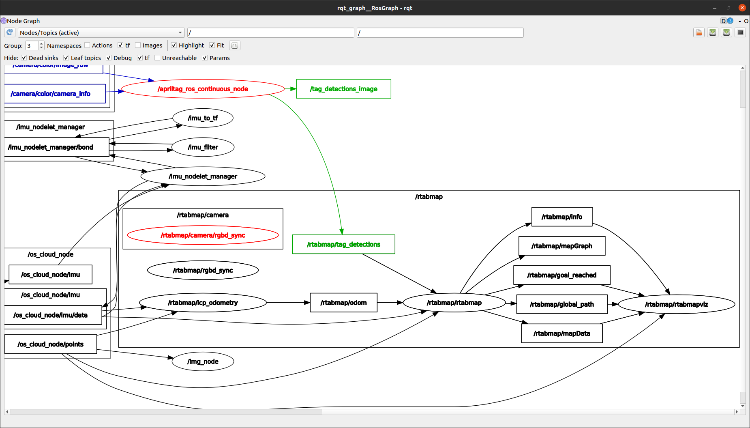
I have re-read through the links you supplied making some changes to the launch file. Currently rtabmapviz is recognising the tags albeit a bit off from its true location. I've added some pics below of rtabmapviz and rqt_graph having made some changes.
From the errors the problem appears to stem from rgbd_sync (although i may be wrong) as setting subscribe_rgbd in rtabmap node just blacks out the screen only working if set to true in rtabmapviz node. Setting rgbd_sync in rtabmapviz node removes the laser scan feed only showing the point cloud which isn't too much of a problem. Whilst setting no subscribe nodes returns the laser scan feed to the point cloud whilst still recognising the tag as a landmark. but receive:
[ INFO] [1622591199.428706352]: Odom: ratio=0.766439, std dev=0.024672m|0.007802rad, update time=0.052901s
[ WARN] (2021-06-02 00:46:39.435) Rtabmap.cpp:3049::process() Rejecting all added loop closures (1, first is 123 <-> 13) in this iteration because a wrong loop closure has been detected after graph optimization, resulting in a maximum graph error ratio of 3.064820 (edge 39->40, type=0, abs error=0.081044 m, stddev=0.026443). The maximum error ratio parameter "RGBD/OptimizeMaxError" is 3.000000 of std deviation.
[ WARN] (2021-06-02 00:46:39.435) Rtabmap.cpp:3098::process() Loop closure 123->13 rejected!
[ INFO] [1622591199.436998227]: rtabmap (123): Rate=1.00s, Limit=0.000s, Conversion=0.0017s, RTAB-Map=0.0723s, Maps update=0.0005s pub=0.0000s (local map=49, WM=47)
I've tried multiple configurations within the launch file but i'm still unable to get a live camera feed into rtabmapviz.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-SLAM-with-loop-closure-tp7846p8137.html
Many thanks for your reply.
The second frame is indeed a tag it is somewhat off as i haven't properly mounted the camera and lidar together yet whilst i try and get everything working properly.
I have re-read through the links you supplied making some changes to the launch file. Currently rtabmapviz is recognising the tags albeit a bit off from its true location. I've added some pics below of rtabmapviz and rqt_graph having made some changes.
From the errors the problem appears to stem from rgbd_sync (although i may be wrong) as setting subscribe_rgbd in rtabmap node just blacks out the screen only working if set to true in rtabmapviz node. Setting rgbd_sync in rtabmapviz node removes the laser scan feed only showing the point cloud which isn't too much of a problem. Whilst setting no subscribe nodes returns the laser scan feed to the point cloud whilst still recognising the tag as a landmark. but receive:
[ INFO] [1622591199.428706352]: Odom: ratio=0.766439, std dev=0.024672m|0.007802rad, update time=0.052901s
[ WARN] (2021-06-02 00:46:39.435) Rtabmap.cpp:3049::process() Rejecting all added loop closures (1, first is 123 <-> 13) in this iteration because a wrong loop closure has been detected after graph optimization, resulting in a maximum graph error ratio of 3.064820 (edge 39->40, type=0, abs error=0.081044 m, stddev=0.026443). The maximum error ratio parameter "RGBD/OptimizeMaxError" is 3.000000 of std deviation.
[ WARN] (2021-06-02 00:46:39.435) Rtabmap.cpp:3098::process() Loop closure 123->13 rejected!
[ INFO] [1622591199.436998227]: rtabmap (123): Rate=1.00s, Limit=0.000s, Conversion=0.0017s, RTAB-Map=0.0723s, Maps update=0.0005s pub=0.0000s (local map=49, WM=47)
I've tried multiple configurations within the launch file but i'm still unable to get a live camera feed into rtabmapviz.
| Free forum by Nabble | Edit this page |