Re: Lidar SLAM with loop closure
Posted by denzle on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-SLAM-with-loop-closure-tp7846p8141.html
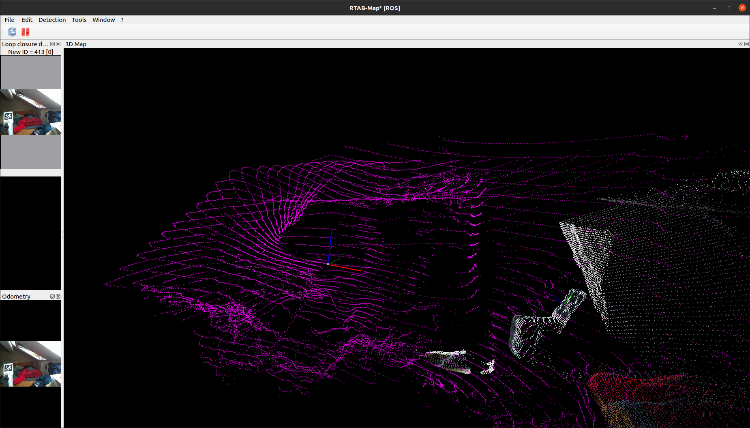
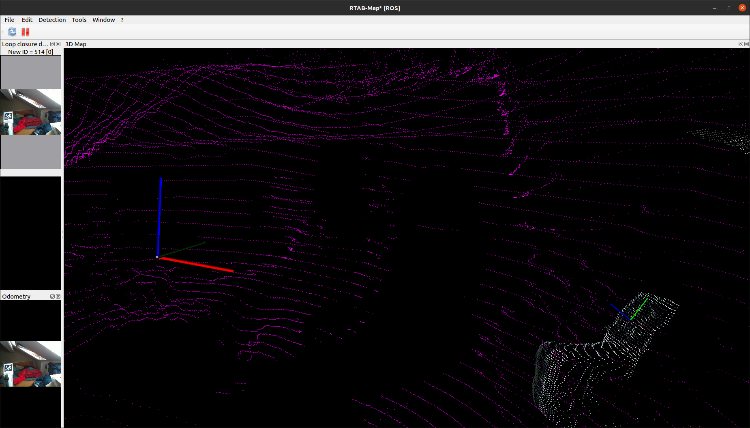
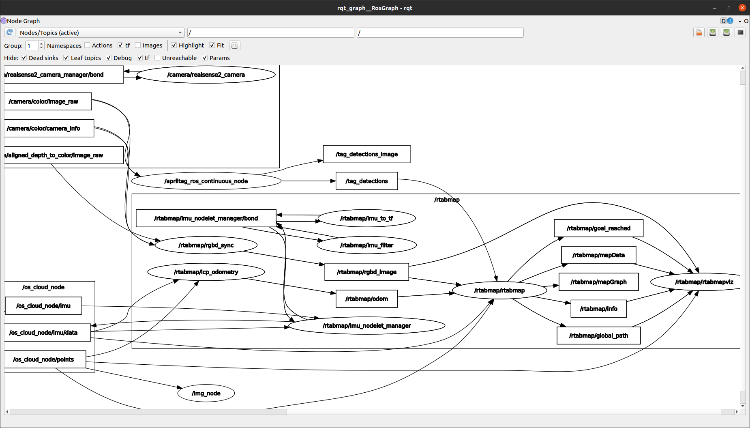
Having had more time troubleshooting i've found that the rbgd_sync problem related to having the D415 launch nodelet outside of the launch file. With it now included rtabmap and the realsense manager are subscribing properly. Also the rgbd_sync nodelet needs to be within the rtabmap group. Then setting approx sync has kicked everything in.
Now my next steps are to ensure the point cloud is made up from the lidar rather than the camera and have the camera solely for tag detection. Hopefully i'll be able to make some more progress after work by re-incorporating the changes mentioned in the links provided.
Cheers
Dan
URL: http://official-rtab-map-forum.206.s1.nabble.com/Lidar-SLAM-with-loop-closure-tp7846p8141.html
Having had more time troubleshooting i've found that the rbgd_sync problem related to having the D415 launch nodelet outside of the launch file. With it now included rtabmap and the realsense manager are subscribing properly. Also the rgbd_sync nodelet needs to be within the rtabmap group. Then setting approx sync has kicked everything in.
Now my next steps are to ensure the point cloud is made up from the lidar rather than the camera and have the camera solely for tag detection. Hopefully i'll be able to make some more progress after work by re-incorporating the changes mentioned in the links provided.
Cheers
Dan
| Free forum by Nabble | Edit this page |