Realtime Map Merger Improvements
Posted by derektan1995 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Realtime-Map-Merger-Improvements-tp8200.html
Hi Mathieu,
Hope you are well. I have fully setup RTABMap on my robots and it has been working very well. I am currently trying out the RTABMap Map Merger package, and had some success with it. I would like to hear from you on how I can achieve robots pose initialization in SLAM mode, at the start of the Map Merger process.
Map Merger Package
Map Merger Package (Github)
RTABMap Forum Post
Here is a video of the results:
Point Cloud Map Merging Video
Here is database of the results:
mapmerge.db
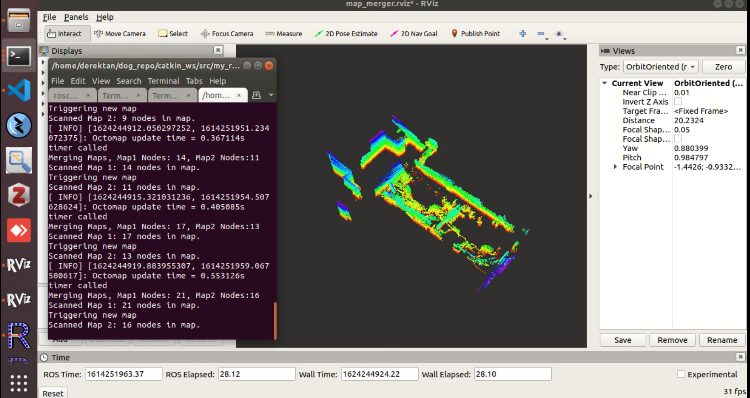
As you can see from the video, we have 2 robots with RTABMap SLAM nodes running. As the map is being built up, mapData message is published to the RTABMap server, which will merge the map together with the package linked above. Unfortunately, both robots will start at the origin, which results in the map looking like this:
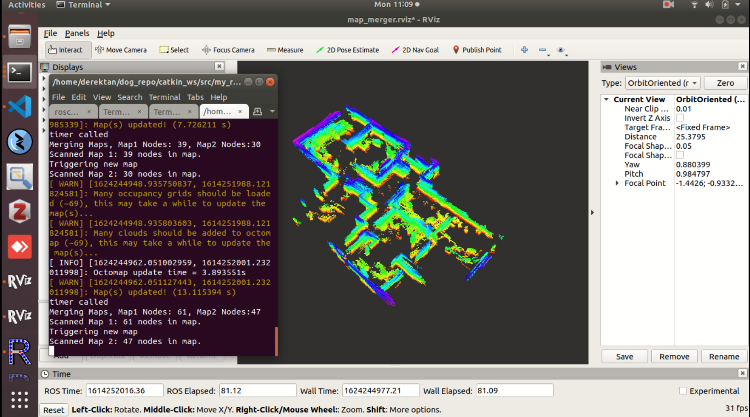
After a loop closure is detected, both maps will be shifted to the correct location on 'map' frame. The merged map will then look like this:
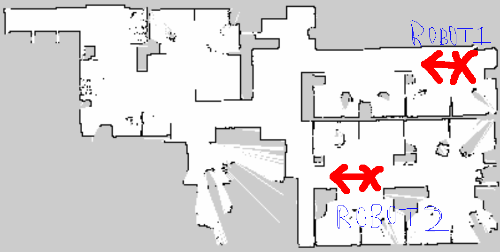
I wonder if it is possible to initialize the robots to specific transforms in the global map frame right at the beginning in SLAM mode? It should look something like this for 2 robots (Assuming that the map has yet to be built):
I attempted to use the initialpose topic, but realized that it was only designed to be used in Localization mode. I also attempted to start the robot in localization mode, set their initial pose, and then use the service call to switch to Mapping mode. This didn't work either. Looking forward to hearing from you.
Thanks,
Derek
URL: http://official-rtab-map-forum.206.s1.nabble.com/Realtime-Map-Merger-Improvements-tp8200.html
Hi Mathieu,
Hope you are well. I have fully setup RTABMap on my robots and it has been working very well. I am currently trying out the RTABMap Map Merger package, and had some success with it. I would like to hear from you on how I can achieve robots pose initialization in SLAM mode, at the start of the Map Merger process.
Map Merger Package
Map Merger Package (Github)
RTABMap Forum Post
Here is a video of the results:
Point Cloud Map Merging Video
Here is database of the results:
mapmerge.db
As you can see from the video, we have 2 robots with RTABMap SLAM nodes running. As the map is being built up, mapData message is published to the RTABMap server, which will merge the map together with the package linked above. Unfortunately, both robots will start at the origin, which results in the map looking like this:
After a loop closure is detected, both maps will be shifted to the correct location on 'map' frame. The merged map will then look like this:
I wonder if it is possible to initialize the robots to specific transforms in the global map frame right at the beginning in SLAM mode? It should look something like this for 2 robots (Assuming that the map has yet to be built):
I attempted to use the initialpose topic, but realized that it was only designed to be used in Localization mode. I also attempted to start the robot in localization mode, set their initial pose, and then use the service call to switch to Mapping mode. This didn't work either. Looking forward to hearing from you.
Thanks,
Derek
| Free forum by Nabble | Edit this page |