Re: Autonomous Navigation
Posted by g.bartoli on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-tp801p825.html
YES!!! Following your advices we succeeded in make the Navigation Stack work together with RTAB-Map, the robot plans a path inside the mapped environment to reach the provided goal. Many many thanks for al your precious help, Mathieu! :)
After this, we made some more tests, and some other questions came along:
1) We used "depthimage_to_laserscan" as you suggested, but does the alternative "gen_scan" option also provide "/scan" other than "grid_map"?
2) As I told you before, "proj_map" is much worse than "grid_map", I made two screenshot to compare them... this not a question, it's just to show you the difference! :)
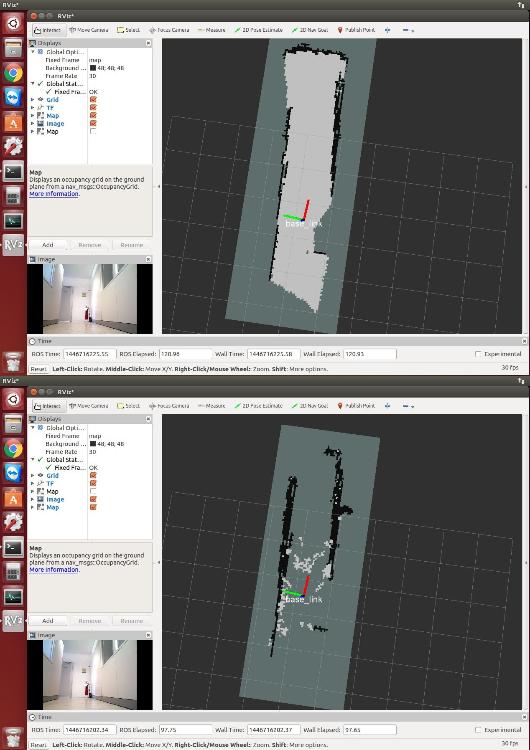
3) Do you know how we can remotely show a RGB decimated camera stream? Currently RViz runs on a remote server that, other than "grid_map" and "tf", shows the compressed "camera/rgb/image_rect_color", but sometimes it's very heavy on the bandwidth and we don't need all that resolution (you can see this in the bottom left corner of the previous images)
4) What is the correct way to show the optimized graph in RViz? We tried "rtabmap/MapGraph" plugin enabling "Download graph", but nothing happens...
5) You mentioned that, for sake of simplicity, you omitted the obstacle detection in yaml files. It seems to me that the planner already uses the local cost map to plan a local path avoiding obstacles in front of it. What are the benefits of adding the obstacle detection (plugin?), too? Do you have some suggestions on how to do it? Additionally, do you know where can we find an official documentation about all these plugins and parameters used by move_base? We explored the ROS Wiki, but we could not find any information other than the official "move_base" tutorial, but your files contains a lot of parameters that seems not elsewhere documented
6) Connected to 5), how can all the external parameters supported by a generic node be shown? Your "rtabmap" supports "--params" argument, but "move_base" seems to not have that
7) I checked the Wiki, but I could not find a way to set the vertical height (image row) of the scanline extracted by "depthimage_to_laserscan". Do you know if it is possible or do I have to implement a custom node by myself to do this?
Thanks again,
Guido
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-tp801p825.html
YES!!! Following your advices we succeeded in make the Navigation Stack work together with RTAB-Map, the robot plans a path inside the mapped environment to reach the provided goal. Many many thanks for al your precious help, Mathieu! :)
After this, we made some more tests, and some other questions came along:
1) We used "depthimage_to_laserscan" as you suggested, but does the alternative "gen_scan" option also provide "/scan" other than "grid_map"?
2) As I told you before, "proj_map" is much worse than "grid_map", I made two screenshot to compare them... this not a question, it's just to show you the difference! :)
3) Do you know how we can remotely show a RGB decimated camera stream? Currently RViz runs on a remote server that, other than "grid_map" and "tf", shows the compressed "camera/rgb/image_rect_color", but sometimes it's very heavy on the bandwidth and we don't need all that resolution (you can see this in the bottom left corner of the previous images)
4) What is the correct way to show the optimized graph in RViz? We tried "rtabmap/MapGraph" plugin enabling "Download graph", but nothing happens...
5) You mentioned that, for sake of simplicity, you omitted the obstacle detection in yaml files. It seems to me that the planner already uses the local cost map to plan a local path avoiding obstacles in front of it. What are the benefits of adding the obstacle detection (plugin?), too? Do you have some suggestions on how to do it? Additionally, do you know where can we find an official documentation about all these plugins and parameters used by move_base? We explored the ROS Wiki, but we could not find any information other than the official "move_base" tutorial, but your files contains a lot of parameters that seems not elsewhere documented
6) Connected to 5), how can all the external parameters supported by a generic node be shown? Your "rtabmap" supports "--params" argument, but "move_base" seems to not have that
7) I checked the Wiki, but I could not find a way to set the vertical height (image row) of the scanline extracted by "depthimage_to_laserscan". Do you know if it is possible or do I have to implement a custom node by myself to do this?
Thanks again,
Guido
~Guido
| Free forum by Nabble | Edit this page |