Re: Painting a pointcloud.
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Painting-a-pointcloud-tp8130p8271.html
Hi Mikor,
Sorry I am super late in my emails, got a lot of projects in parallel to debug.
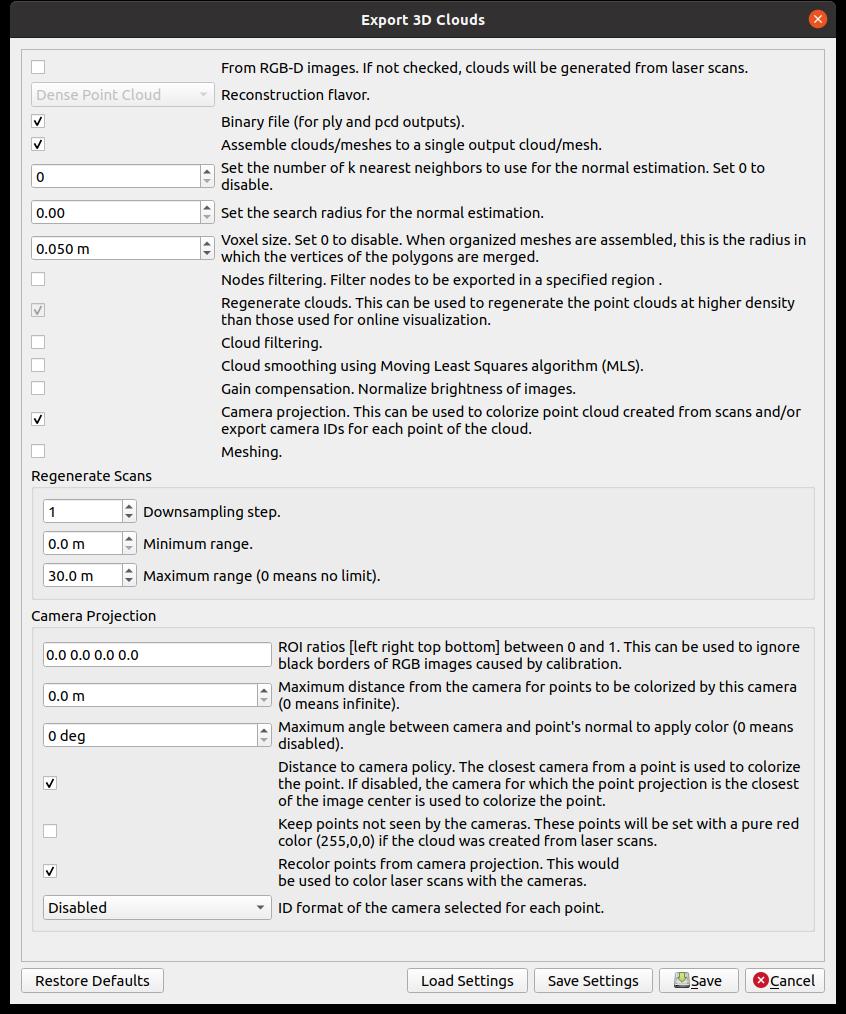
With option 2, if the point cloud is too sparse, enable regeneration option and decrease the voxel size. For example, if the voxel size is 0 and you regenerate scans without decimation, you will have all point cloud of the scans (cannot be more dense than that, except if you assemble all lidar scans prior to rtabmap node with point_cloud_assembler, like in this velodyne example or this example, or that you increase Rtabmap/DetectionRate to add more nodes to graph). You can also set "Keep points not seen by the cameras" to keep all scan points.
The camera projection also works with a multi-cameras setup. You should synchronize each camera with rgbd_sync nodelet, then use subscribe_rgbd=true for rtabmap node, like this example. To use nodelet without a nodelet manager and without depth image, we can do (using rgb_sync instead of rgbd_sync):
For the issue that the colored clouds is smaller as the voxel size is smaller, are you also regenerating the clouds with normals? You may compare with and without normals (setting normal estimation to 0). I cannot reproduce the problem. IF you can share the database, I could try it.
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/Painting-a-pointcloud-tp8130p8271.html
Hi Mikor,
Sorry I am super late in my emails, got a lot of projects in parallel to debug.
With option 2, if the point cloud is too sparse, enable regeneration option and decrease the voxel size. For example, if the voxel size is 0 and you regenerate scans without decimation, you will have all point cloud of the scans (cannot be more dense than that, except if you assemble all lidar scans prior to rtabmap node with point_cloud_assembler, like in this velodyne example or this example, or that you increase Rtabmap/DetectionRate to add more nodes to graph). You can also set "Keep points not seen by the cameras" to keep all scan points.
The camera projection also works with a multi-cameras setup. You should synchronize each camera with rgbd_sync nodelet, then use subscribe_rgbd=true for rtabmap node, like this example. To use nodelet without a nodelet manager and without depth image, we can do (using rgb_sync instead of rgbd_sync):
<group ns="camera1">
<node pkg="nodelet" type="nodelet" name="rgb_sync" args="standalone rtabmap_ros/rgb_sync">
<remap from="rgb/image" to="rgb/image_rect_color"/>
<remap from="rgb/camera_info" to="rgb/camera_info"/>
</node>
</group>
<group ns="camera2">
<node pkg="nodelet" type="nodelet" name="rgb_sync" args="standalone rtabmap_ros/rgb_sync">
<remap from="rgb/image" to="rgb/image_rect_color"/>
<remap from="depth/image" to="depth_registered/image_raw"/>
<remap from="rgb/camera_info" to="rgb/camera_info"/>
</node>
</group>
Only fisheye and pinhole cameras can be used in rtabmap. 360 cameras are not yet supported. Maximum cameras are limited by the implementation, currently supporting maximum 6 cameras.
For the issue that the colored clouds is smaller as the voxel size is smaller, are you also regenerating the clouds with normals? You may compare with and without normals (setting normal estimation to 0). I cannot reproduce the problem. IF you can share the database, I could try it.
cheers,
Mathieu
| Free forum by Nabble | Edit this page |