RTAB-MAP with only 3D LIDAR and no loop closing
Posted by Amber on
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-MAP-with-only-3D-LIDAR-and-no-loop-closing-tp8282.html
Hi Mathieu,
I recently started using RTAB-MAP with ROS support with v0.20.9-melodic. My first issue is that when I run in the mapping mode, it does not use the Bayes filter to update the nodes. I created a few checkpoints to print, but they do not print because, signature->isBadSignature()is not set false ever.
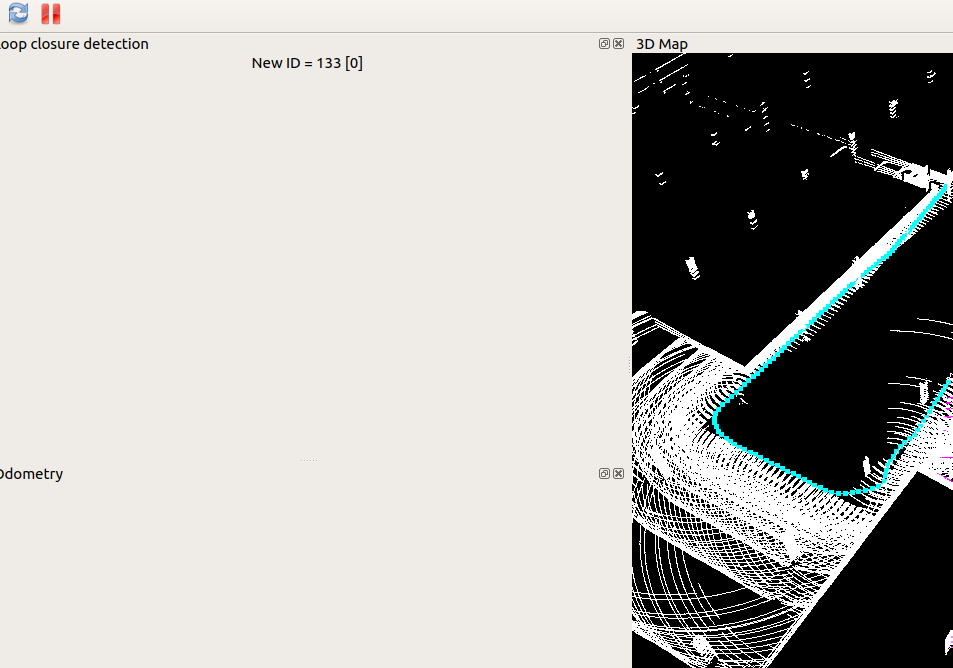
The loop closure is never detected and shows just like the one in the below image.
Following is the shared launch file that I am using.
https://drive.google.com/file/d/1DUIEUCgC8esZIaxRVT56EG0a4F-BmfUQ/view?usp=sharing
I also need your suggestion if this launch file is fine to get the desired results. If not, kindly suggest changes.
URL: http://official-rtab-map-forum.206.s1.nabble.com/RTAB-MAP-with-only-3D-LIDAR-and-no-loop-closing-tp8282.html
Hi Mathieu,
I recently started using RTAB-MAP with ROS support with v0.20.9-melodic. My first issue is that when I run in the mapping mode, it does not use the Bayes filter to update the nodes. I created a few checkpoints to print, but they do not print because, signature->isBadSignature()is not set false ever.
The loop closure is never detected and shows just like the one in the below image.
Following is the shared launch file that I am using.
https://drive.google.com/file/d/1DUIEUCgC8esZIaxRVT56EG0a4F-BmfUQ/view?usp=sharing
I also need your suggestion if this launch file is fine to get the desired results. If not, kindly suggest changes.
| Free forum by Nabble | Edit this page |