my robot model is under the map
Posted by Adam_lahoud on
URL: http://official-rtab-map-forum.206.s1.nabble.com/my-robot-model-is-under-the-map-tp8340.html
Hi,
I have build a wheeled robot model. I have added two realsense D435 cameras at the front to this robot and one at the back as shown in figure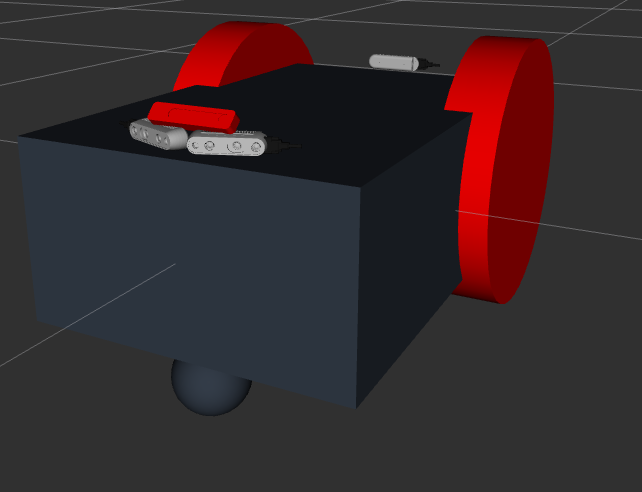 .
.
I used a realsense T265 tilted by 45 degree with respect to base_link that provides odometry.
I am using rtabmap. The generated frames tree is given by frames.pdf.
The problem is that when running slam, the robot is tilted under the map as shown in figure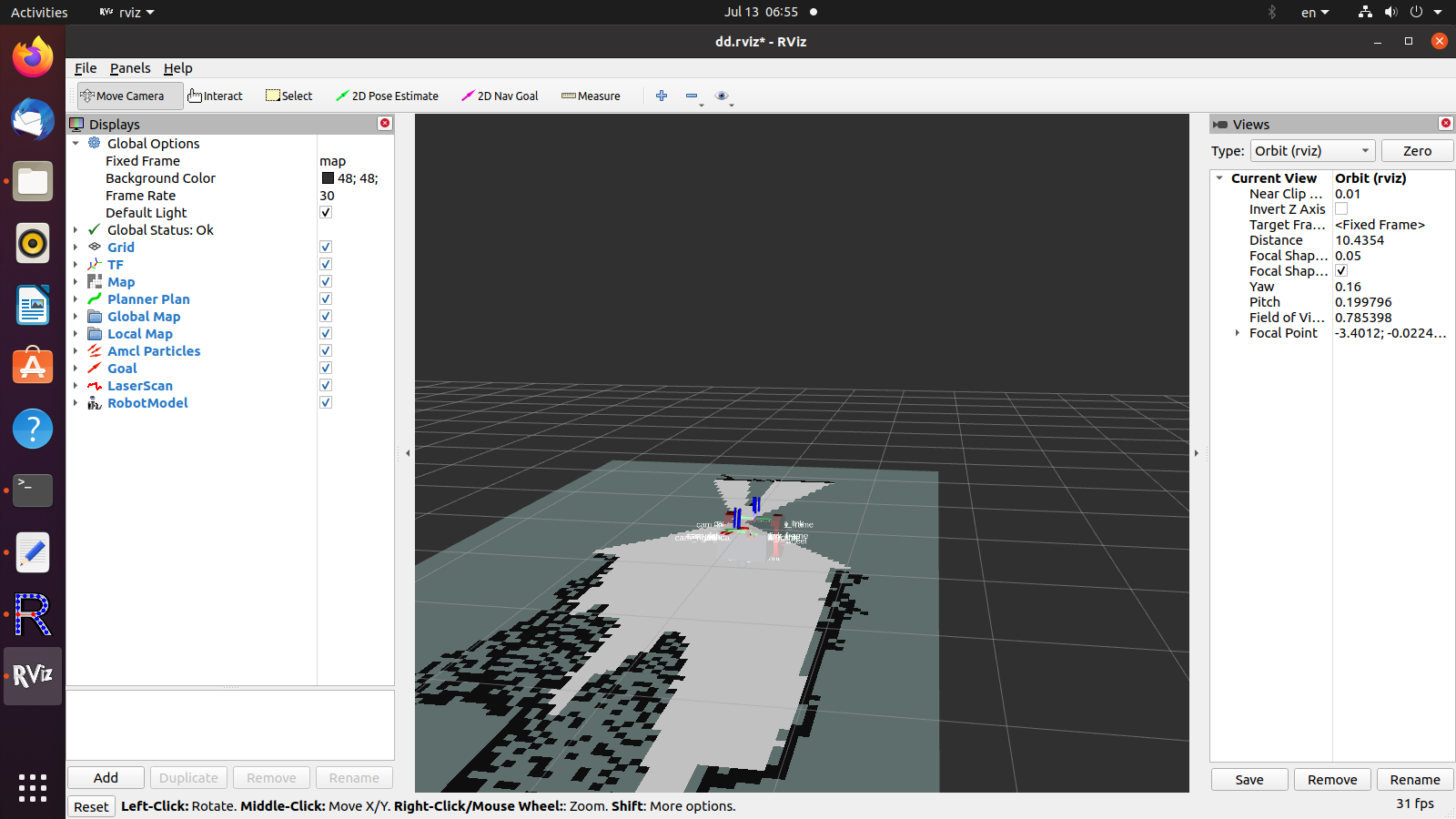 and
and 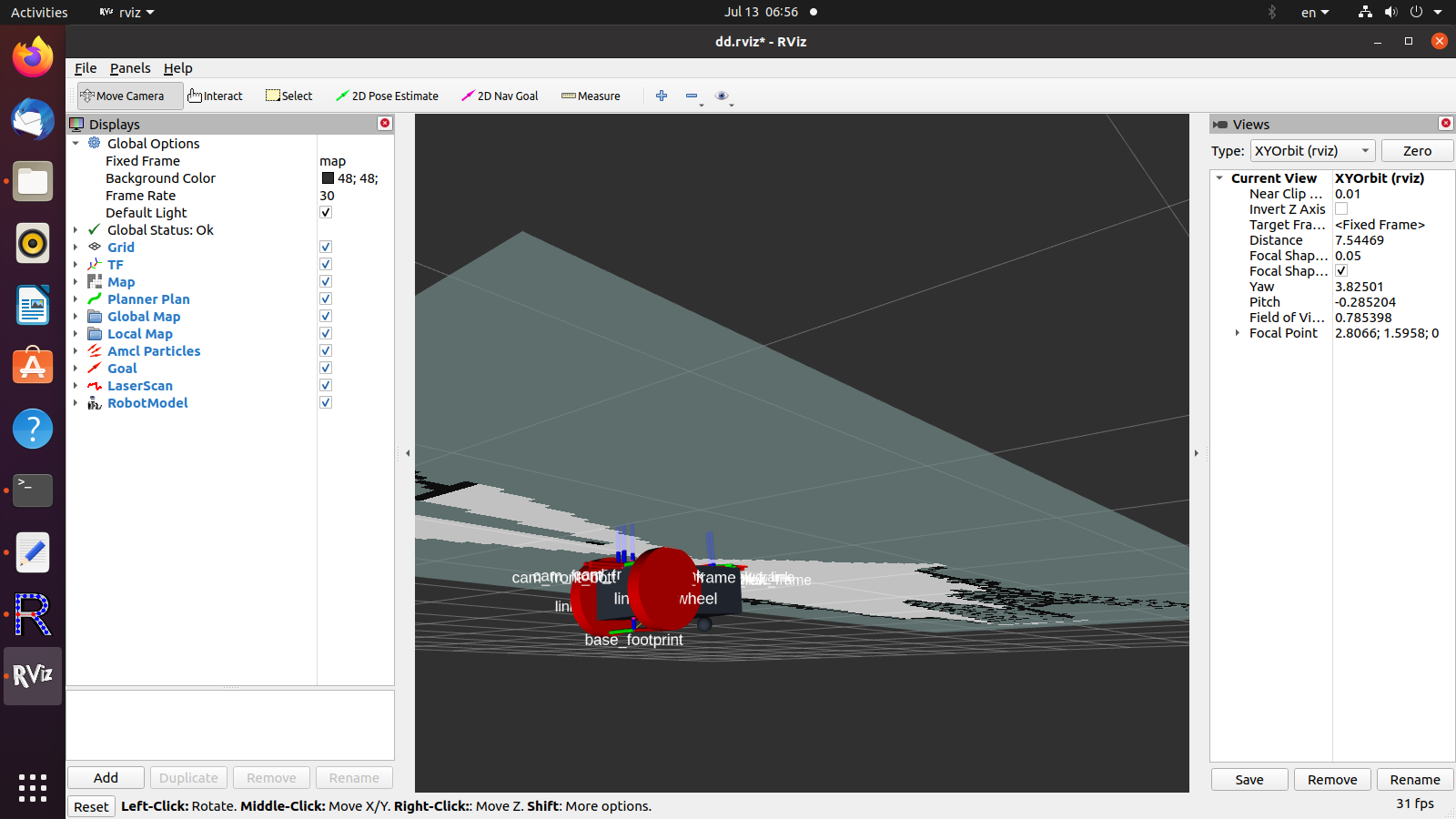 .
.
Any suggestions?
URL: http://official-rtab-map-forum.206.s1.nabble.com/my-robot-model-is-under-the-map-tp8340.html
Hi,
I have build a wheeled robot model. I have added two realsense D435 cameras at the front to this robot and one at the back as shown in figure
.
I used a realsense T265 tilted by 45 degree with respect to base_link that provides odometry.
I am using rtabmap. The generated frames tree is given by frames.pdf.
The problem is that when running slam, the robot is tilted under the map as shown in figure
and .
Any suggestions?
| Free forum by Nabble | Edit this page |