How to improve mapping accuracy based on ArUco identification code?
Posted by ChenTengyun on
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-improve-mapping-accuracy-based-on-ArUco-identification-code-tp8393.html
Hi Mathieu,
From the GitHub Wiki and rtabmap forum, I have seen a lot of your professional replies to rtabmap + marker questions. I judge you are an expert in this field and am glad to communicate with you. At present, I also have problems with rtabmap + marker. I hope to get your full support.
【Objectives I need to achieve and their basic ideas】:
1. Each mapping starts from the same place identified by an ArUco to ensure that the reference coordinate system is the same for each mapping;
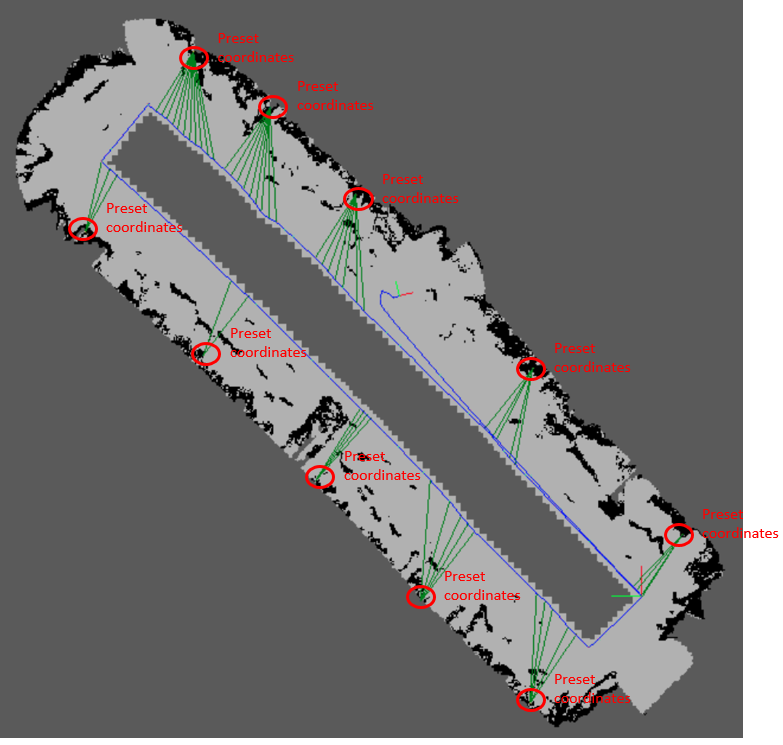
2. ArUco identification codes with known 3D coordinates are deployed around the survey area in advance. Its reference coordinate system is the starting point of each mapping, and the IDs and coordinates of all ArUco identification codes in the area are configured to the rtabmap system in advance;
3. During each mapping, when the camera moves and detects the pre deployed ArUco identification code, the known coordinate value of the ArUco identification code is used to correct the error of the visual odometer in time;
4.Finally, the mapping accuracy of the whole area is improved.
【help context】:
1. Based on the existing rtabmap code on GitHub, the ArUco identification code is added to help improve the mapping accuracy. For this goal, a specific code modification scheme is proposed. I hope to hear your suggestions. Or provide some reference documents or reference codes.
2. Based on Ubuntu 18.04 + ROS melodic, modify the rtabmap code, compile the source code, replace the corresponding module of rtabmap in the system, run it and debug it. I hope you can provide some reference opinions and materials for this work.
cheers,
ChenTengyun
URL: http://official-rtab-map-forum.206.s1.nabble.com/How-to-improve-mapping-accuracy-based-on-ArUco-identification-code-tp8393.html
Hi Mathieu,
From the GitHub Wiki and rtabmap forum, I have seen a lot of your professional replies to rtabmap + marker questions. I judge you are an expert in this field and am glad to communicate with you. At present, I also have problems with rtabmap + marker. I hope to get your full support.
【Objectives I need to achieve and their basic ideas】:
1. Each mapping starts from the same place identified by an ArUco to ensure that the reference coordinate system is the same for each mapping;
2. ArUco identification codes with known 3D coordinates are deployed around the survey area in advance. Its reference coordinate system is the starting point of each mapping, and the IDs and coordinates of all ArUco identification codes in the area are configured to the rtabmap system in advance;
3. During each mapping, when the camera moves and detects the pre deployed ArUco identification code, the known coordinate value of the ArUco identification code is used to correct the error of the visual odometer in time;
4.Finally, the mapping accuracy of the whole area is improved.
【help context】:
1. Based on the existing rtabmap code on GitHub, the ArUco identification code is added to help improve the mapping accuracy. For this goal, a specific code modification scheme is proposed. I hope to hear your suggestions. Or provide some reference documents or reference codes.
2. Based on Ubuntu 18.04 + ROS melodic, modify the rtabmap code, compile the source code, replace the corresponding module of rtabmap in the system, run it and debug it. I hope you can provide some reference opinions and materials for this work.
cheers,
ChenTengyun
| Free forum by Nabble | Edit this page |