Create map with the playback from database file or bag file
Posted by TMYNUS on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Create-map-with-the-playback-from-database-file-or-bag-file-tp8415.html
Hi
My goal is to create a map from data that has been recorder beforehand. As far as I understand this can either be done with bag files or with the RTAB-Map data recorder, which records a database file. So far I have hit a roadblock with both of these options.
I am using an Intel Realsense L515. Below are the commands I use to start everything up:
I have tried recording a bag file and playing it back while opening RTAB-Map, but I get an odometry error. New stamps should be greater than previous stamps.
My second approach was to use the data-recorder launch file provided by RTAB-Map ROS. Below is the command I used to record the scan session:
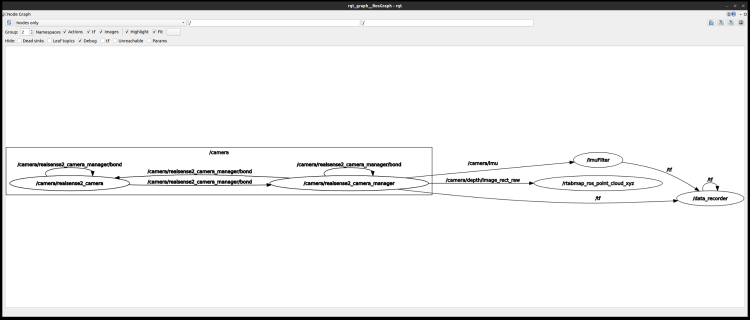
Here is a screenshot of the rqt graph if it helps:
After the recording is finished, a ".db" file can be found in "home/.ros" If I open this file with RTAB-Map I can import the database, but nothing much after that. If I open RTAB-Map database viewer, I can play back the database but only the images are shown. The database has no graph or anything else. The map and Odom windows are blank. Am I doing something wrong?
If it helps, here is the command I use to start RTAB-Map normally and do online mapping:
Any help in the right direction would be greatly appreciated. Thanks in advance
T
URL: http://official-rtab-map-forum.206.s1.nabble.com/Create-map-with-the-playback-from-database-file-or-bag-file-tp8415.html
Hi
My goal is to create a map from data that has been recorder beforehand. As far as I understand this can either be done with bag files or with the RTAB-Map data recorder, which records a database file. So far I have hit a roadblock with both of these options.
I am using an Intel Realsense L515. Below are the commands I use to start everything up:
roslaunch realsense2_camera rs_camera.launch align_depth:=true unite_imu_method:="linear_interpolation" enable_gyro:=true enable_accel:=true
rosrun imu_filter_madgwick imu_filter_node _use_mag:=false _publish_tf:=false _world_frame:="enu" /imu/data_raw:=/camera/imu /imu/data:=/rtabmap/imu
rosrun nodelet nodelet standalone rtabmap_ros/point_cloud_xyz _approx_sync:=false /depth/image:=/camera/depth/image_rect_raw /depth/camera_info:=/camera/depth/camera_info _decimation:=4
I have tried recording a bag file and playing it back while opening RTAB-Map, but I get an odometry error. New stamps should be greater than previous stamps.
My second approach was to use the data-recorder launch file provided by RTAB-Map ROS. Below is the command I used to record the scan session:
roslaunch rtabmap_ros data_recorder.launch subscribe_scan_cloud:=true approx_sync:=false scan_cloud_topic:=/cloud depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw rgb_info_topic:=/camera/color/camera_info
Here is a screenshot of the rqt graph if it helps:
After the recording is finished, a ".db" file can be found in "home/.ros" If I open this file with RTAB-Map I can import the database, but nothing much after that. If I open RTAB-Map database viewer, I can play back the database but only the images are shown. The database has no graph or anything else. The map and Odom windows are blank. Am I doing something wrong?
If it helps, here is the command I use to start RTAB-Map normally and do online mapping:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="\ --delete_db_on_start \ --Icp/VoxelSize 0.05 \ --Icp/PointToPlaneRadius 0 \ --Icp/PointToPlaneK 20 \ --Icp/CorrespondenceRatio 0.2 \ --Icp/PMOutlierRatio 0.65 \ --Icp/Epsilon 0.005 \ --Icp/PointToPlaneMinComplexity 0 \ --Odom/ScanKeyFrameThr 0.7 \ --OdomF2M/ScanMaxSize 15000 \ --Optimizer/GravitySigma 0.3 \ --RGBD/ProximityPathMaxNeighbors 1 \ --Reg/Strategy 1 --Odom/ResetCountdown 10 --Vis/EstimationType 1 " publish_tf:=false publish_null_when_lost:=true guess_from_tf:=true cloud_noise_filtering_radius:=0.05 queue_size:=200 DetectionRate:=30 icp_odometry:=true scan_cloud_topic:=/cloud subscribe_scan_cloud:=true depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info approx_sync:=false wait_imu_to_init:=true imu_topic:=/rtabmap/imu
Any help in the right direction would be greatly appreciated. Thanks in advance
T
| Free forum by Nabble | Edit this page |