Re: Autonomous Navigation
Posted by g.bartoli on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-tp801p846.html
However, even if I use the "/rtabmap/goal", I still see that once "rtabmap/global_path" has been computed and the robot navigate, it does not change when the map is optimized, so sometimes I set a goal, but the robot stops far from it, because after the optimization the goal has fallen inside a local obstacle and the planner rightly cannot reach it. Even worse, if the robot odometry has a large error (slipping wheels or crashing against an undetected obstacle), when the visual relocalization occurs, the map is correctly synchronized with robot position, but the global path remains still (often outside the global map itself) and the robot tries to follow it without success because it cannot reach it.
This a screenshot of what happens to the global path when a relocalization occurs:
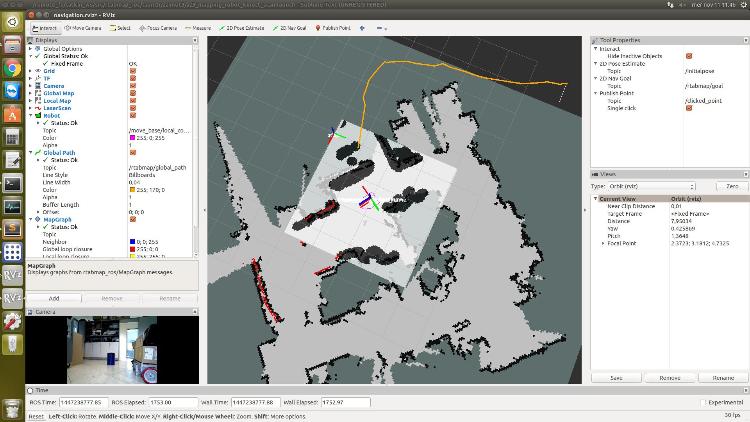
Obviously this is not happening with "OptimizeFromGraphEnd=false", because the map is not changing, but the robot position is corrected during the navigation, which is a bit annoying, as you already pointed out. Shouldn't the goal and the intermediate nodes be continuosly updated by rtabmap in relation to map frame?
URL: http://official-rtab-map-forum.206.s1.nabble.com/Autonomous-Navigation-tp801p846.html
Ok, that works, thanks!
However, even if I use the "/rtabmap/goal", I still see that once "rtabmap/global_path" has been computed and the robot navigate, it does not change when the map is optimized, so sometimes I set a goal, but the robot stops far from it, because after the optimization the goal has fallen inside a local obstacle and the planner rightly cannot reach it. Even worse, if the robot odometry has a large error (slipping wheels or crashing against an undetected obstacle), when the visual relocalization occurs, the map is correctly synchronized with robot position, but the global path remains still (often outside the global map itself) and the robot tries to follow it without success because it cannot reach it.
This a screenshot of what happens to the global path when a relocalization occurs:
Obviously this is not happening with "OptimizeFromGraphEnd=false", because the map is not changing, but the robot position is corrected during the navigation, which is a bit annoying, as you already pointed out. Shouldn't the goal and the intermediate nodes be continuosly updated by rtabmap in relation to map frame?
Actually, rtabmap node subscribes to goal, but does not publish "goal_out", I used "rostopic list" and it is not present. In RViz I added the Pose display, but only "/rtabmap/goal" (the final pose) can be shown. I found "goal_out" is mentioned also in the rtabmap node wiki, but I still cannot find where it is in ROS.
Ok, I added them, it's more informative, now.
Can you take a look at this?
~Guido
| Free forum by Nabble | Edit this page |