Re: Painting a pointcloud.
Posted by Mikor on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Painting-a-pointcloud-tp8130p8490.html
I've also updated rtabmap and rtabmap_ros and build it with sync multiple rgbd = on but still the problem persists.
Edit: I've used rqt_graph and noticed that the velodyne_points are not used anywhere and thought that probably that's why the rtabmap node does not do the mapping because it does not get any pointcloud information.
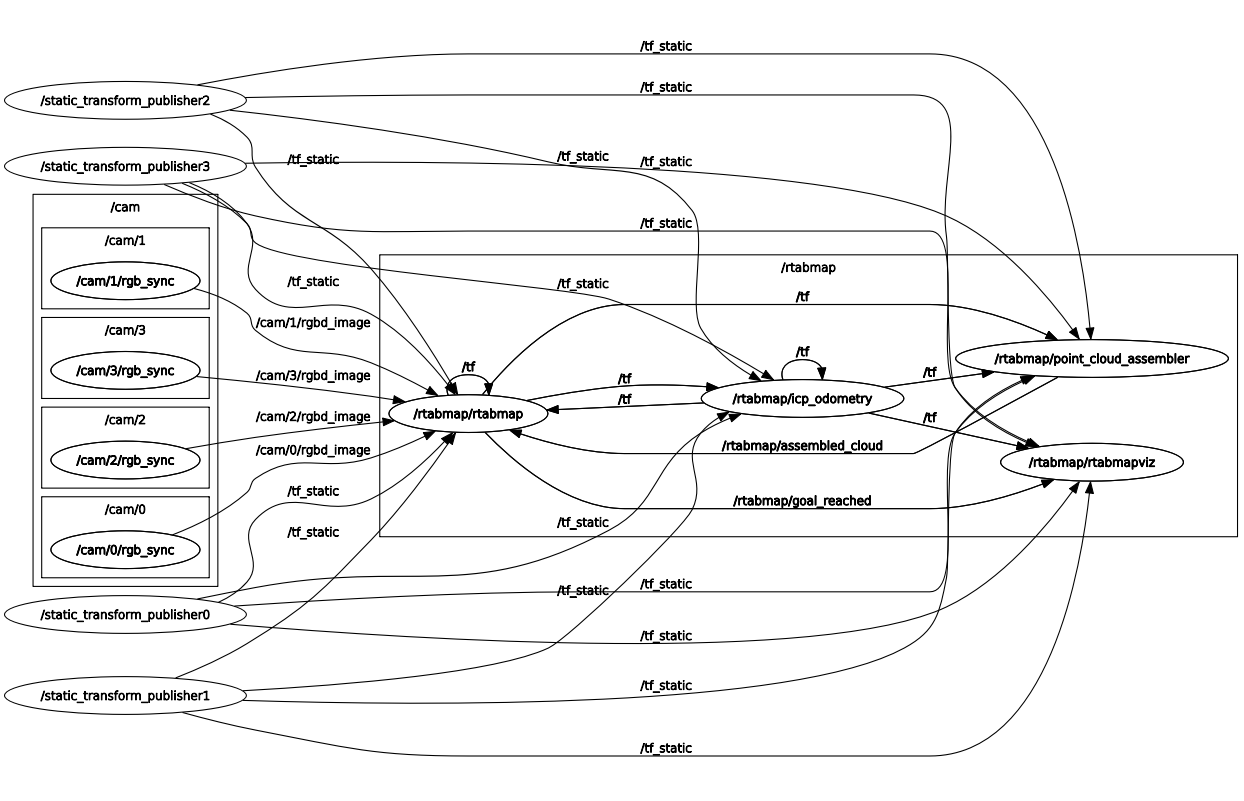
So, I "unsubscribed" the assembled_cloud from rtabmap and put the velodyne points instead and then the mapping took place for a while and then it went back to calculating only the odometry.
Edit: It turns out it was a performance issue, I played the bag at 0.1 publishing rate and rtab could keep up then. By the way how did you create that mesh??
URL: http://official-rtab-map-forum.206.s1.nabble.com/Painting-a-pointcloud-tp8130p8490.html
I've also updated rtabmap and rtabmap_ros and build it with sync multiple rgbd = on but still the problem persists.
Edit: I've used rqt_graph and noticed that the velodyne_points are not used anywhere and thought that probably that's why the rtabmap node does not do the mapping because it does not get any pointcloud information.
So, I "unsubscribed" the assembled_cloud from rtabmap and put the velodyne points instead and then the mapping took place for a while and then it went back to calculating only the odometry.
[ INFO] [1630570233.393540313, 1629829804.850763082]: Odom: ratio=0.000000, std dev=99.995000m|99.995000rad, update time=0.154839s [ INFO] [1630570233.409803086, 1629829804.850763082]: Odom: ratio=0.836938, std dev=0.005718m|0.001808rad, update time=0.013644s [ INFO] [1630570233.449052252, 1629829804.850763082]: Odom: ratio=0.845547, std dev=0.008236m|0.002604rad, update time=0.013834s [ INFO] [1630570233.537438915, 1629829804.850763082]: Odom: ratio=0.836528, std dev=0.008828m|0.002792rad, update time=0.019863s [ INFO] [1630570233.637143535, 1629829804.850763082]: Odom: ratio=0.833708, std dev=0.008222m|0.002600rad, update time=0.014642s [ INFO] [1630570233.770131524, 1629829804.850763082]: Odom: ratio=0.841512, std dev=0.007842m|0.002480rad, update time=0.026171s [ INFO] [1630570233.866934699, 1629829804.850763082]: Odom: ratio=0.847419, std dev=0.007552m|0.002388rad, update time=0.015904s [ INFO] [1630570233.974825271, 1629829804.850763082]: Odom: ratio=0.840180, std dev=0.007928m|0.002507rad, update time=0.011775s beignet-opencl-icd: no supported GPU found, this is probably the wrong opencl-icd package for this hardware (If you have multiple ICDs installed and OpenCL works, you can ignore this message) [ INFO] [1630570234.059638595, 1629829804.850763082]: Odom: ratio=0.833239, std dev=0.008410m|0.002659rad, update time=0.020498s [ WARN] (2021-09-02 11:10:34.069) Memory.cpp:4223::createSignature() Initializing rectification maps for camera 0 (only done for the first image received)... beignet-opencl-icd: no supported GPU found, this is probably the wrong opencl-icd package for this hardware (If you have multiple ICDs installed and OpenCL works, you can ignore this message) [ INFO] [1630570234.122715822, 1629829804.850763082]: Odom: ratio=0.843346, std dev=0.007070m|0.002236rad, update time=0.019018s [ WARN] (2021-09-02 11:10:34.171) Memory.cpp:4225::createSignature() Initializing rectification maps for camera 0 (only done for the first image received)... done! [ WARN] (2021-09-02 11:10:34.175) Memory.cpp:4223::createSignature() Initializing rectification maps for camera 1 (only done for the first image received)... [ WARN] (2021-09-02 11:10:34.184) Memory.cpp:4225::createSignature() Initializing rectification maps for camera 1 (only done for the first image received)... done! [ WARN] (2021-09-02 11:10:34.185) Memory.cpp:4223::createSignature() Initializing rectification maps for camera 2 (only done for the first image received)... [ WARN] (2021-09-02 11:10:34.193) Memory.cpp:4225::createSignature() Initializing rectification maps for camera 2 (only done for the first image received)... done! [ WARN] (2021-09-02 11:10:34.194) Memory.cpp:4223::createSignature() Initializing rectification maps for camera 3 (only done for the first image received)... [ WARN] (2021-09-02 11:10:34.203) Memory.cpp:4225::createSignature() Initializing rectification maps for camera 3 (only done for the first image received)... done! [ INFO] [1630570234.243331662, 1629829804.850763082]: Odom: ratio=0.855942, std dev=0.005289m|0.001672rad, update time=0.017438s [ INFO] [1630570234.284673870, 1629829804.850763082]: Odom: ratio=0.830242, std dev=0.008273m|0.002616rad, update time=0.013766s [ INFO] [1630570234.308315016, 1629829804.850763082]: rtabmap (1): Rate=0.00s, Limit=0.000s, Conversion=0.0047s, RTAB-Map=0.2292s, Maps update=0.0093s pub=0.0002s (local map=1, WM=1) [ INFO] [1630570234.388091117, 1629829804.850763082]: Odom: ratio=0.855693, std dev=0.005471m|0.001730rad, update time=0.018222s [ INFO] [1630570234.393628169, 1629829804.850763082]: rtabmap (2): Rate=0.00s, Limit=0.000s, Conversion=0.0021s, RTAB-Map=0.0789s, Maps update=0.0016s pub=0.0000s (local map=1, WM=1) [ INFO] [1630570234.461723141, 1629829804.850763082]: Odom: ratio=0.837366, std dev=0.008453m|0.002673rad, update time=0.017704s [ INFO] [1630570234.486379878, 1629829804.850763082]: rtabmap (3): Rate=0.00s, Limit=0.000s, Conversion=0.0019s, RTAB-Map=0.0873s, Maps update=0.0014s pub=0.0000s (local map=1, WM=1) [ INFO] [1630570234.571137654, 1629829804.850763082]: rtabmap (4): Rate=0.00s, Limit=0.000s, Conversion=0.0033s, RTAB-Map=0.0769s, Maps update=0.0015s pub=0.0000s (local map=1, WM=1) [ INFO] [1630570234.638850669, 1629829804.850763082]: Odom: ratio=0.857788, std dev=0.006186m|0.001956rad, update time=0.017014s [ INFO] [1630570234.656285376, 1629829804.850763082]: rtabmap (5): Rate=0.00s, Limit=0.000s, Conversion=0.0022s, RTAB-Map=0.0791s, Maps update=0.0015s pub=0.0000s (local map=1, WM=1) [ INFO] [1630570234.708512711, 1629829804.850763082]: Odom: ratio=0.833146, std dev=0.008494m|0.002686rad, update time=0.022176s [ INFO] [1630570234.744209751, 1629829804.850763082]: rtabmap (6): Rate=0.00s, Limit=0.000s, Conversion=0.0027s, RTAB-Map=0.0809s, Maps update=0.0019s pub=0.0000s (local map=1, WM=1) [ INFO] [1630570234.824585715, 1629829804.850763082]: rtabmap (7): Rate=0.00s, Limit=0.000s, Conversion=0.0015s, RTAB-Map=0.0759s, Maps update=0.0016s pub=0.0000s (local map=1, WM=1) [ INFO] [1630570234.847605279, 1629829804.850763082]: Odom: ratio=0.863045, std dev=0.006005m|0.001899rad, update time=0.014721s [ INFO] [1630570234.917815855, 1629829804.850763082]: Odom: ratio=0.837458, std dev=0.008762m|0.002771rad, update time=0.014627s [ INFO] [1630570235.051295212, 1629829804.850763082]: Odom: ratio=0.859718, std dev=0.004743m|0.001500rad, update time=0.012098s [ INFO] [1630570235.146625721, 1629829804.850763082]: Odom: ratio=0.835779, std dev=0.007285m|0.002304rad, update time=0.012475s [ INFO] [1630570235.301368228, 1629829804.850763082]: Odom: ratio=0.834463, std dev=0.008471m|0.002679rad, update time=0.045941s [ INFO] [1630570235.352021758, 1629829804.850763082]: Odom: ratio=0.834452, std dev=0.008562m|0.002707rad, update time=0.035442s [ INFO] [1630570235.537794234, 1629829804.850763082]: Odom: ratio=0.840832, std dev=0.008360m|0.002644rad, update time=0.041472s [ INFO] [1630570235.601066469, 1629829804.850763082]: Odom: ratio=0.843414, std dev=0.008277m|0.002617rad, update time=0.053597s [ INFO] [1630570235.635360268, 1629829804.850763082]: Odom: ratio=0.832961, std dev=0.008578m|0.002713rad, update time=0.023475s [ INFO] [1630570235.783174970, 1629829804.850763082]: Odom: ratio=0.830306, std dev=0.008905m|0.002816rad, update time=0.020224s [ INFO] [1630570236.020323382, 1629829804.850763082]: Odom: ratio=0.835500, std dev=0.008567m|0.002709rad, update time=0.037034s
Edit: It turns out it was a performance issue, I played the bag at 0.1 publishing rate and rtab could keep up then. By the way how did you create that mesh??
| Free forum by Nabble | Edit this page |