Re: icp_odometry with LOAM crash
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/icp-odometry-with-LOAM-crash-tp8261p8606.html
Hi Heiko,
I updated the launch file to set parameters related to kitti bags (the launch is configured by default to test with a real hand-held VLP16). I added floam_sensor option to select 64 rings lidar (required for kitti bags).
To test with a kitti rosbag:
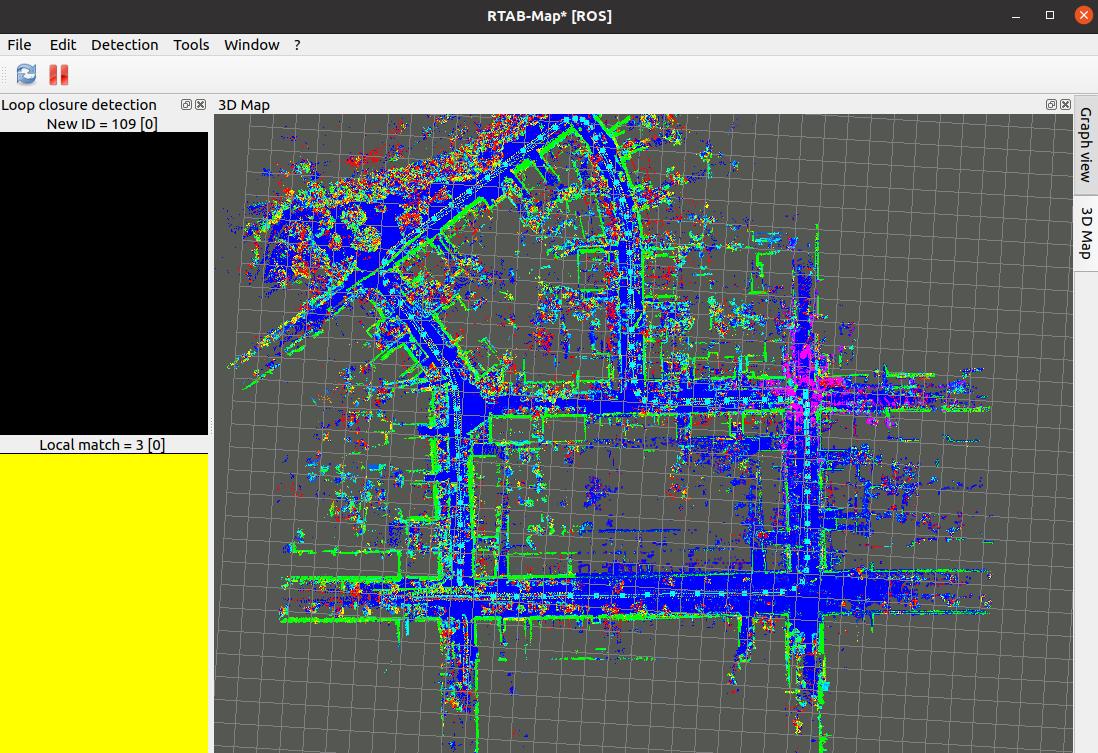
FLOAM should be able to process data under 100 ms, otherwise it drifts a lot. I added queue_size option too to make sure that all scans are processed even if there are some processing time spikes that went over 100 ms. On my laptop, with resolution = 0.4, it is able to process most scans under 100 ms, so it works. With loop_ratio:=0.2, the loop closure can be detected and corrected:
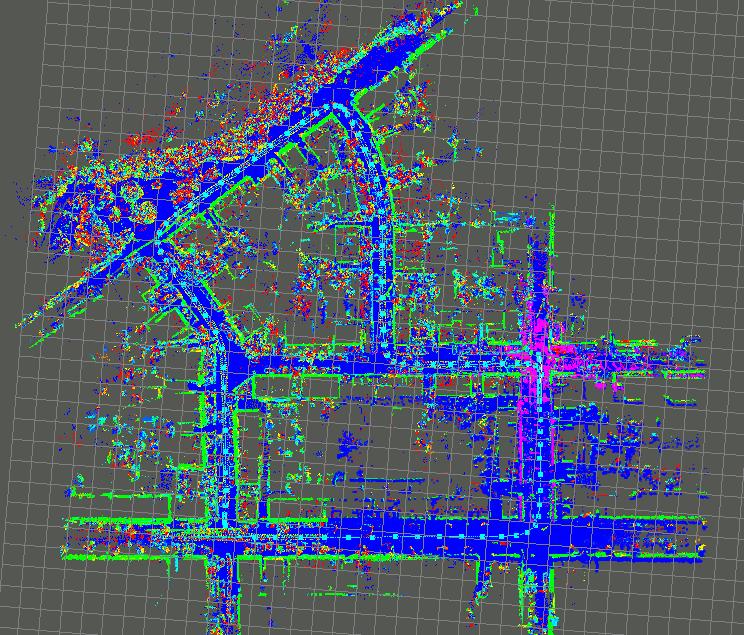
Without loop closure:
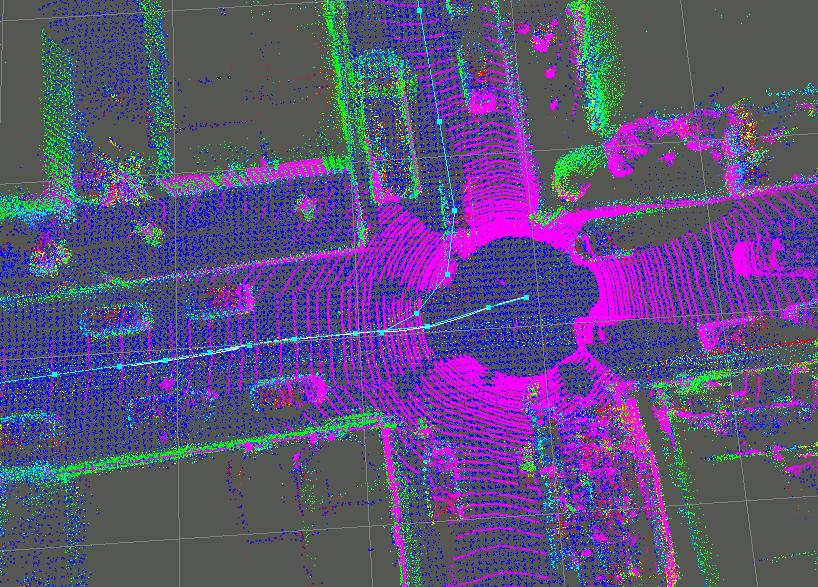
Closer, with and without loop closure:
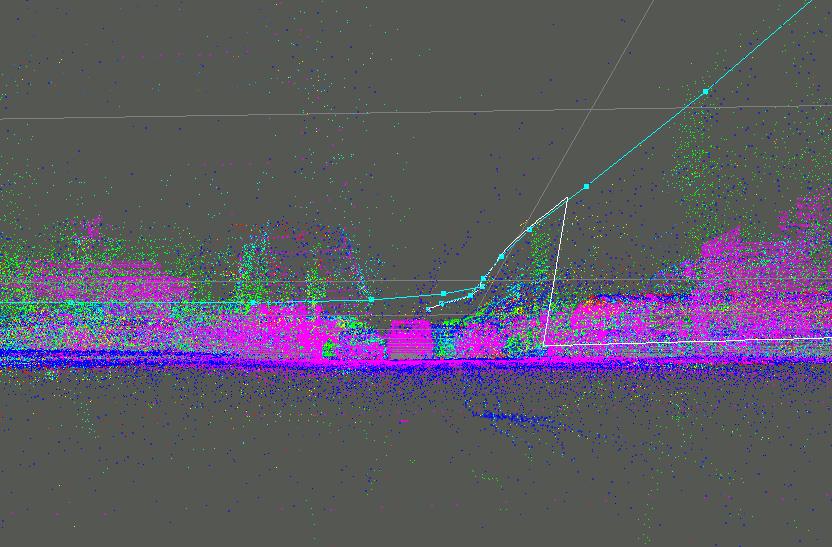
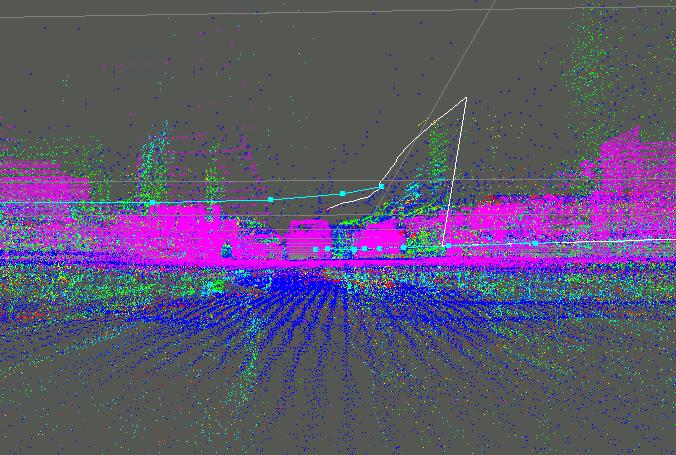
Area of the loop closure (after optimization):
cheers,
Mathieu
URL: http://official-rtab-map-forum.206.s1.nabble.com/icp-odometry-with-LOAM-crash-tp8261p8606.html
Hi Heiko,
I updated the launch file to set parameters related to kitti bags (the launch is configured by default to test with a real hand-held VLP16). I added floam_sensor option to select 64 rings lidar (required for kitti bags).
To test with a kitti rosbag:
$ roslaunch rtabmap_ros test_velodyne.launch resolution:=0.4 floam:=true floam_sensor:=2 use_sim_time:=true queue_size:=100 loop_ratio:=0.2 $ rosbag play --clock 2011_09_30_0027.bag
FLOAM should be able to process data under 100 ms, otherwise it drifts a lot. I added queue_size option too to make sure that all scans are processed even if there are some processing time spikes that went over 100 ms. On my laptop, with resolution = 0.4, it is able to process most scans under 100 ms, so it works. With loop_ratio:=0.2, the loop closure can be detected and corrected:
Without loop closure:
Closer, with and without loop closure:
Area of the loop closure (after optimization):
cheers,
Mathieu
| Free forum by Nabble | Edit this page |