Re: Slam using Intel RealSense tracking camera - T265
Posted by matlabbe on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Slam-using-Intel-RealSense-tracking-camera-T265-tp6333p8632.html
Hi,
It depends on the orientation of the IMU. Here some examples where the rtabmap's odometry is correctly initializing the odometry with x forward.
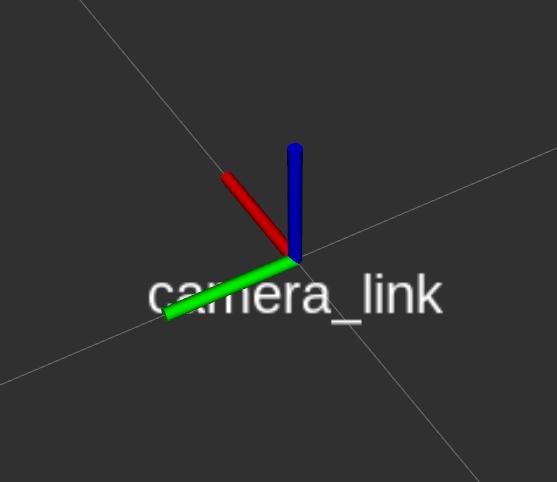
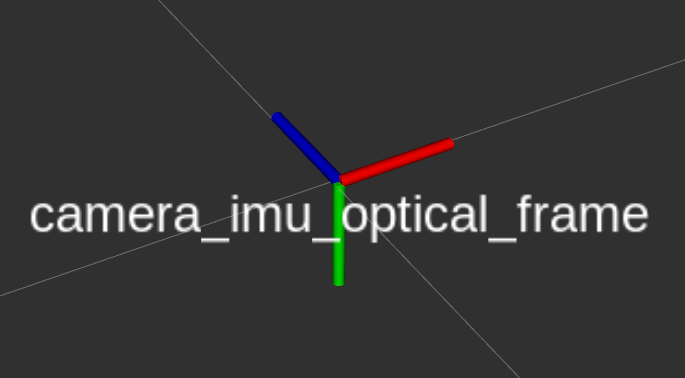
L515/D435i with IMU set at 90 deg on right (with z down):
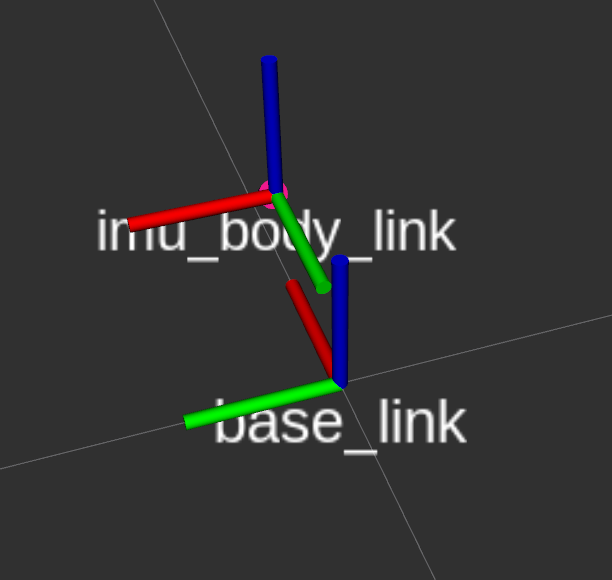
Drone with IMU set at 90 deg on left:
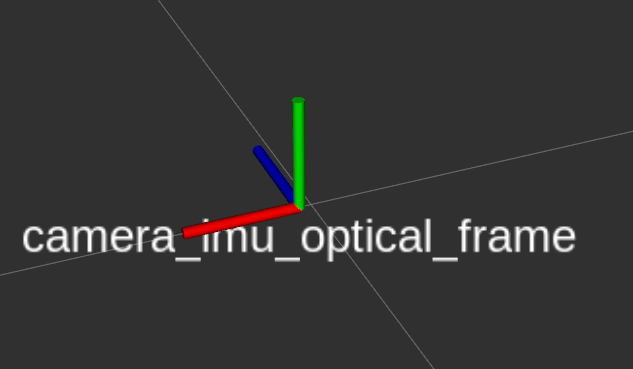
Those above examples start the odometry correctly. However for T265, it is starting 90deg towards left (-y axis). Here is the IMU frame on T265:
Not sure exactly why this happens. Maybe it is related on how magdwick or complementary filters are initializing. I was able to make the odometry with T265 starts towards +x axis, but I had to remove the theta() fix here. However, doing so, all the above examples (D435i,L515, drone) above starts at 90 deg in yaw. Your fix ("nwu") may be the cleanest way to do it.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Slam-using-Intel-RealSense-tracking-camera-T265-tp6333p8632.html
Hi,
It depends on the orientation of the IMU. Here some examples where the rtabmap's odometry is correctly initializing the odometry with x forward.
L515/D435i with IMU set at 90 deg on right (with z down):
Drone with IMU set at 90 deg on left:
Those above examples start the odometry correctly. However for T265, it is starting 90deg towards left (-y axis). Here is the IMU frame on T265:
Not sure exactly why this happens. Maybe it is related on how magdwick or complementary filters are initializing. I was able to make the odometry with T265 starts towards +x axis, but I had to remove the theta() fix here. However, doing so, all the above examples (D435i,L515, drone) above starts at 90 deg in yaw. Your fix ("nwu") may be the cleanest way to do it.
| Free forum by Nabble | Edit this page |