Navigate to a point outside graph
Posted by g.bartoli on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigate-to-a-point-outside-graph-tp873.html
Hi Mathieu,
I'm trying the autonomous navigation and the robot is doing fine when I set a goal that is very close to an existing node of the graph; the global path is correct and the navigation is smooth while avoiding obstalces.
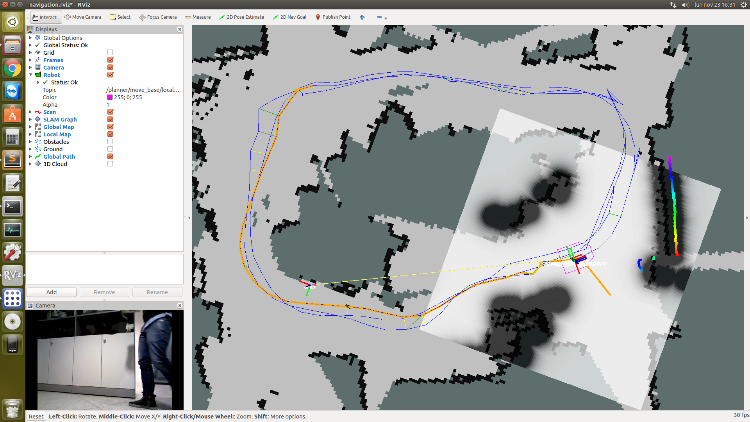
Otherwise, when I set a goal that have a slight offset from the graph, move_base still perform the navigation, but it stops on the nearest point of the graph instead of reaching the desired point. I tried many times to set goals, but I couldn't find an exact threshold when this happens, since it seems to depend on the nearest graph node (in the picture, the global path is the orange line). I tried to increase "RGBD/LocalRadius" to 8 or 10, but it had no effect (looking at the following picture, the real distance from the graph is no more than 1 meter).
The path is clear of obstacles and rtabmap correctly publishes the goal to move_base... do you know why is this happening?
Thanks,
Guido
URL: http://official-rtab-map-forum.206.s1.nabble.com/Navigate-to-a-point-outside-graph-tp873.html
Hi Mathieu,
I'm trying the autonomous navigation and the robot is doing fine when I set a goal that is very close to an existing node of the graph; the global path is correct and the navigation is smooth while avoiding obstalces.
Otherwise, when I set a goal that have a slight offset from the graph, move_base still perform the navigation, but it stops on the nearest point of the graph instead of reaching the desired point. I tried many times to set goals, but I couldn't find an exact threshold when this happens, since it seems to depend on the nearest graph node (in the picture, the global path is the orange line). I tried to increase "RGBD/LocalRadius" to 8 or 10, but it had no effect (looking at the following picture, the real distance from the graph is no more than 1 meter).
The path is clear of obstacles and rtabmap correctly publishes the goal to move_base... do you know why is this happening?
Thanks,
Guido
~Guido
| Free forum by Nabble | Edit this page |