Re: Mysterious error regarding tf timeout
Posted by derektan1995 on
URL: http://official-rtab-map-forum.206.s1.nabble.com/Mysterious-error-regarding-tf-timeout-tp8695p8743.html
Hi Mathieu,
The links you have provided were really helpful. I followed some of your recommended parameters that works well with ouster lidar, namely reducing Grid/RangeMax and Grid/CellSize. Update map timing improved in general. I believe we are getting close to the heart of the issue.
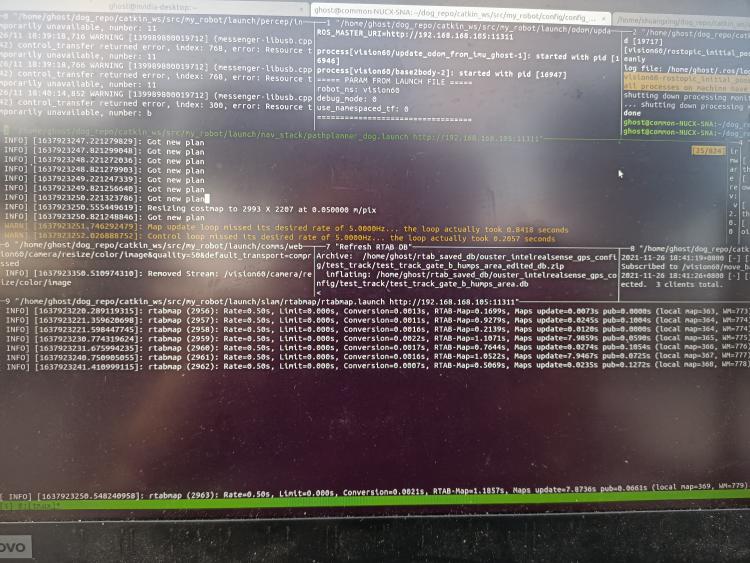
However I still noticed that there are times when rtabmap gets stuck on specific iterations. As you see from the image below, map update can spike to 7s. I noticed this happens whenever the global costmap from the navigation stack automatically resizes, which is an important feature for autonomous exploration (See pane above rtabmap's pane where cursor is at). I believe the global costmap size is linked to rtabmap via the grid_size rtabmap parameter. How is rtabmap internally linked to the ROS navigation stack's global costmap? I wonder if there are ways for Rtabmap to be independent of global costmap size?
Perhaps more background on my use case. I am currently using an Intel NUC as an external PC connected to my robot. It runs all nodes, from perception, to rtabmap, to ROS navigation stack. I'm currently using it for autonomous navigation, as described in your guide here. I am using the ouster lidar to build the map, a Realsense camera to perform global loop closures, and odometry coming from the robot itself. Thanks.
URL: http://official-rtab-map-forum.206.s1.nabble.com/Mysterious-error-regarding-tf-timeout-tp8695p8743.html
Hi Mathieu,
The links you have provided were really helpful. I followed some of your recommended parameters that works well with ouster lidar, namely reducing Grid/RangeMax and Grid/CellSize. Update map timing improved in general. I believe we are getting close to the heart of the issue.
However I still noticed that there are times when rtabmap gets stuck on specific iterations. As you see from the image below, map update can spike to 7s. I noticed this happens whenever the global costmap from the navigation stack automatically resizes, which is an important feature for autonomous exploration (See pane above rtabmap's pane where cursor is at). I believe the global costmap size is linked to rtabmap via the grid_size rtabmap parameter. How is rtabmap internally linked to the ROS navigation stack's global costmap? I wonder if there are ways for Rtabmap to be independent of global costmap size?
Perhaps more background on my use case. I am currently using an Intel NUC as an external PC connected to my robot. It runs all nodes, from perception, to rtabmap, to ROS navigation stack. I'm currently using it for autonomous navigation, as described in your guide here. I am using the ouster lidar to build the map, a Realsense camera to perform global loop closures, and odometry coming from the robot itself. Thanks.
| Free forum by Nabble | Edit this page |